MCRファン倶楽部
>>
写真集
>>
南関東(横須賀)地区大会2009 一般の部 出場マイコンカー
2008.09.01更新
南関東(横須賀)地区大会2009 一般の部 出場マイコンカー
2008.08.24
南関東地区大会2009 一般の部に出場したマイコンカーの写真、仕様をUPしました。紙面の都合上、省略させていただいた部分があります。ご了承ください。
写真
所属
お名前
カーネーム
電池の本数
駆動モータのメーカー、型式、個数、ギヤ比
タイヤの直径
ステアリングのサーボ(またはモータ)の型式、ギヤ比
センサの種類(アナログ、デジタル)と個数
重量
特徴
苦労した点
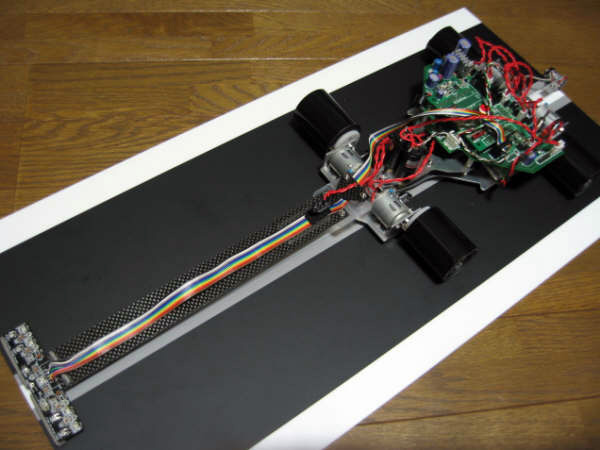
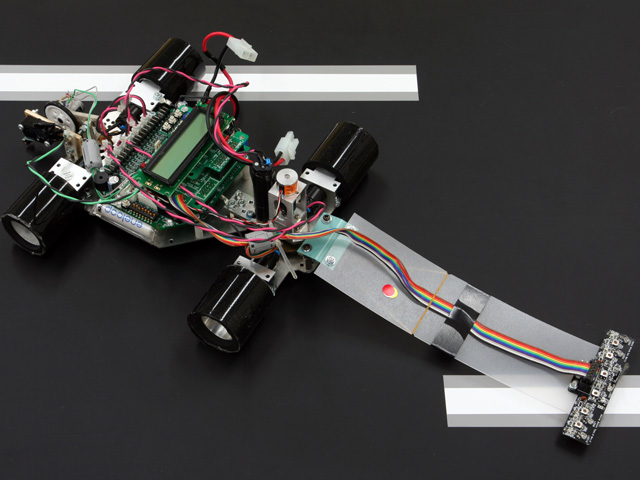
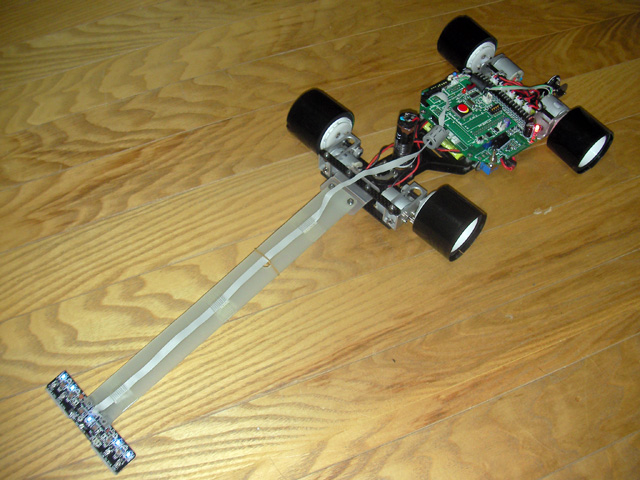
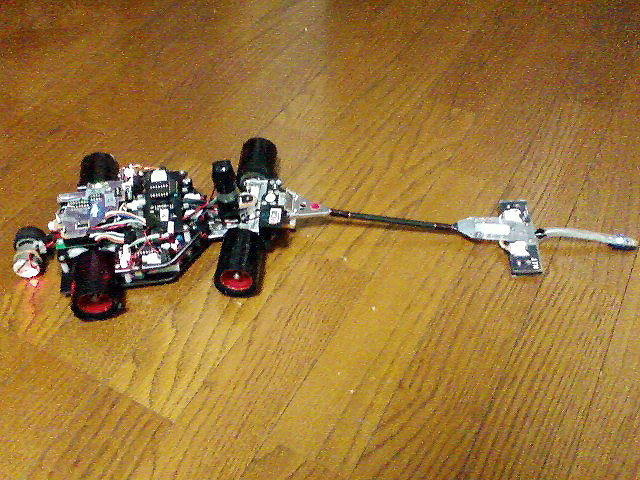
湘南工科大学ロボット技術研究会
黒川 旭
GodArthur4
SANYO製ニッカド×8本
maxon RE16-118682 4個 4.4:1
42mm
maxon RE16-118682 57:1
アナログ2個、デジタル5個 、先読み用デジタル1個
951g
ギヤヘッド付きモータを利用したインホイールモーター。4輪独立制御ではなく、左右独立制御によるプログラムの簡略化。
MCR2009では数多くの新技術導入を目指しています。しかし、新機体製作の時間が足りませんでした。そこで、横須賀大会へは昨年のGodArthur3をメンテナンスして出場しました。
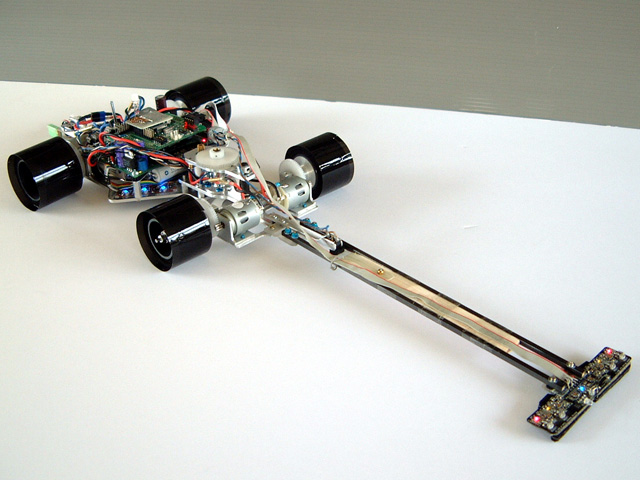
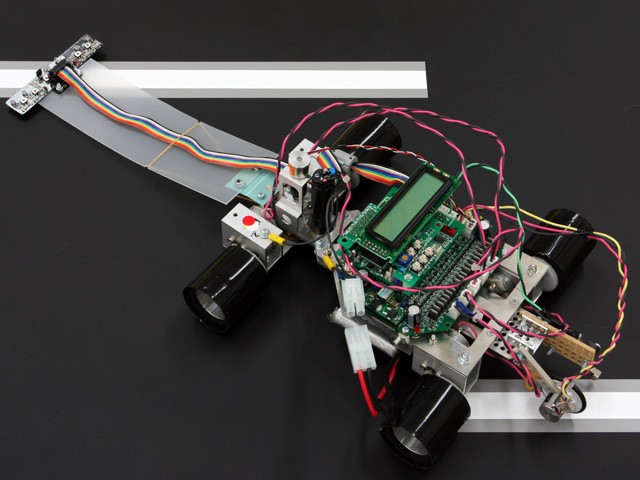
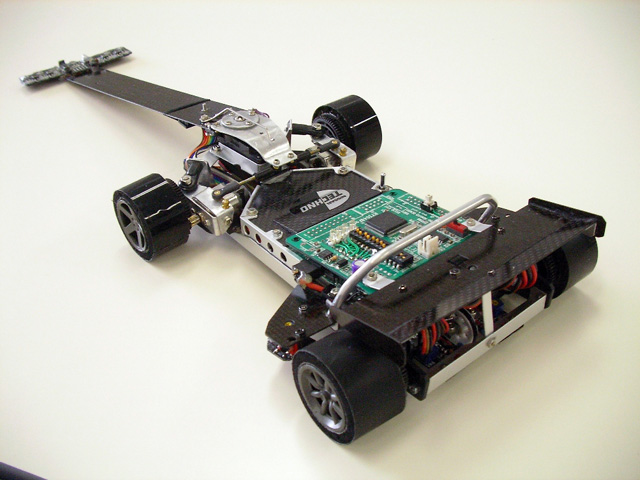
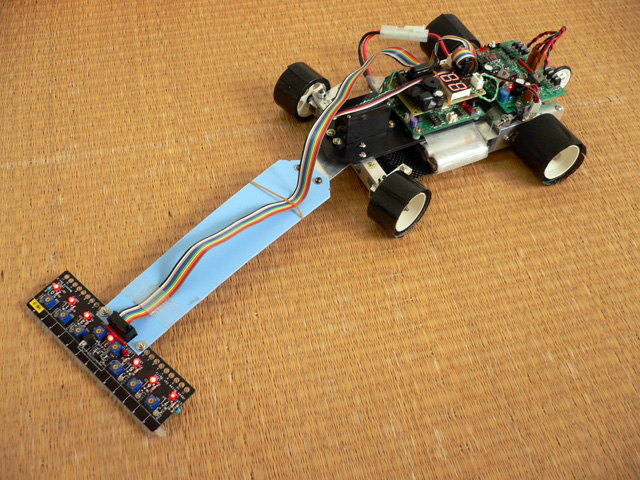
GTマイコンクラブ
田中 順也
FORK08
eneloop 8本
指定モータ、4個(1輪1個)、56:8
40mm
maxon製 RE16 320175×2個、57:1
アナログ2個、デジタル5個、ゲートバー検出用デジタル1個
約920g
4輪独立制御ができるモータドライブを搭載し、マシンの重心が低くなるよう、短いサーボモータを使用した。また、部品点数を少なくし、計量化を図っている。
今年から坂の角度が変更となり、10°に対応するマシンを設計しましたが、設計ミスで10°の坂には対応していなかった。練習走行などではそれに気づくことなく、大会前日の試走会で、そのミスを発見し急いでシャーシを削り、対応した。
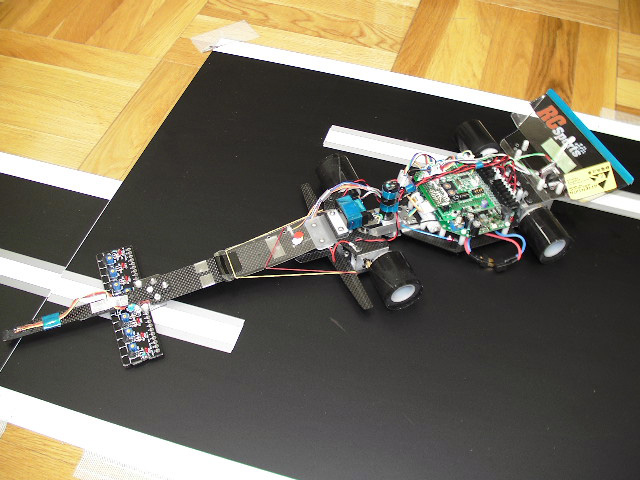
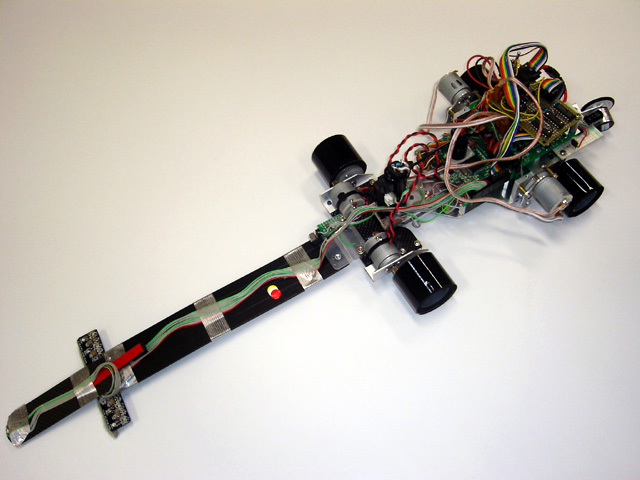
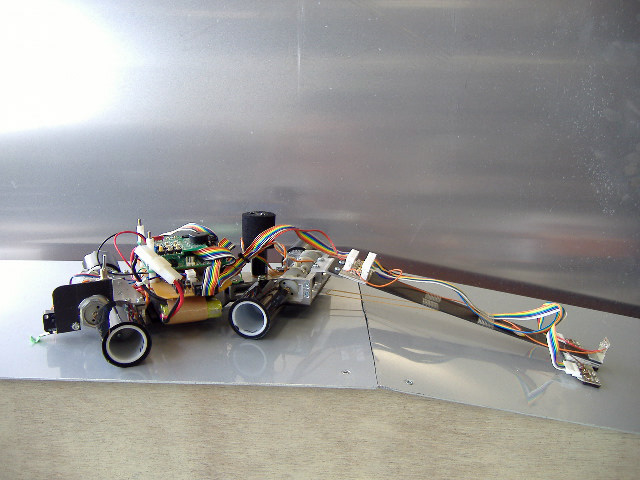
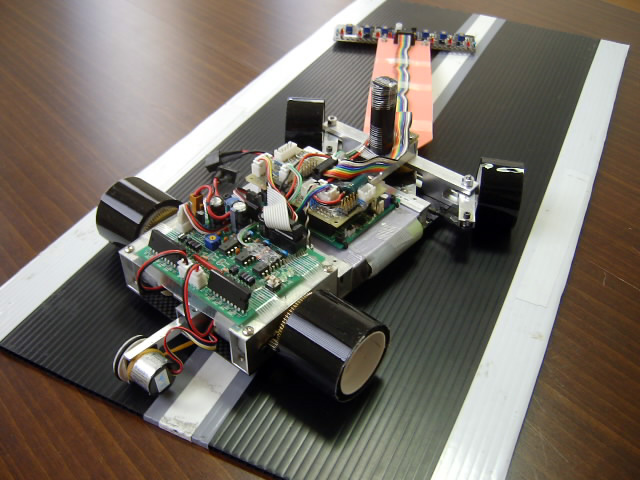
GTマイコンクラブ
内海 裕憲
E−Machine
エネループ 8本
指定モータ1輪1個 合計4個 ギヤ比 前輪1:8・後輪1:9
前輪49mm・後輪54mm
REmax17 ギヤ比 86.4
ラインセンサ:アナログ2個,デジタル5個 車体位置検出センサ:デジタル6個、エンコーダ:ステアリング、車速の2個 坂検出:2個(アップ、ダウン)
932g
シャーシに埋め込んだ車体位置検出センサを使って、カーブ走行中に同じハンドルの切れ角でも、ラインと車体の位置関係で出力を調整しながら走行しています。CPUの入出力信号をCPLDを使って処理しています。走行ログをminiSDカードに高速に保存しています。(約1ミリ秒毎)
CPLDの設計に当たるVHDLを書くことやSDカードのドライバを作るのにかなり苦労しました。車体の製作では高い剛性を出すことに注意しながら軽量化することを目指しましたが、昨年よりもかなりの重量アップになってしまいました。
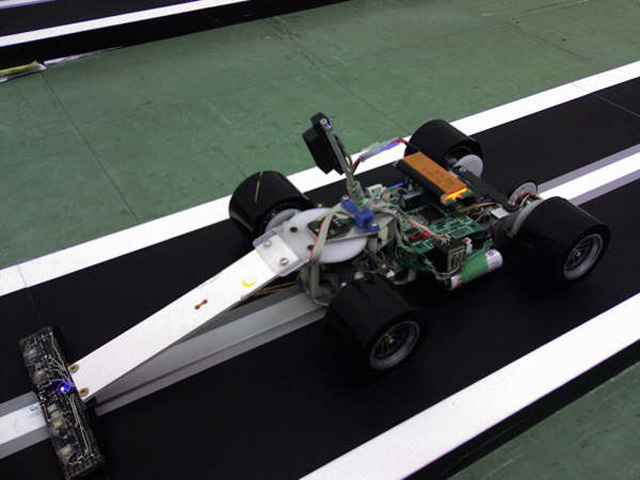
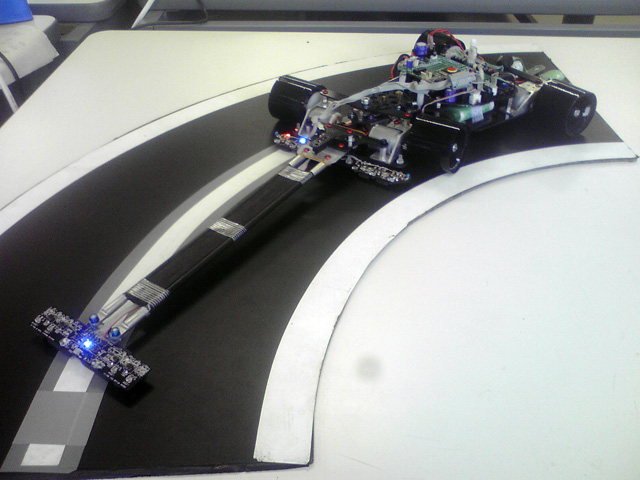
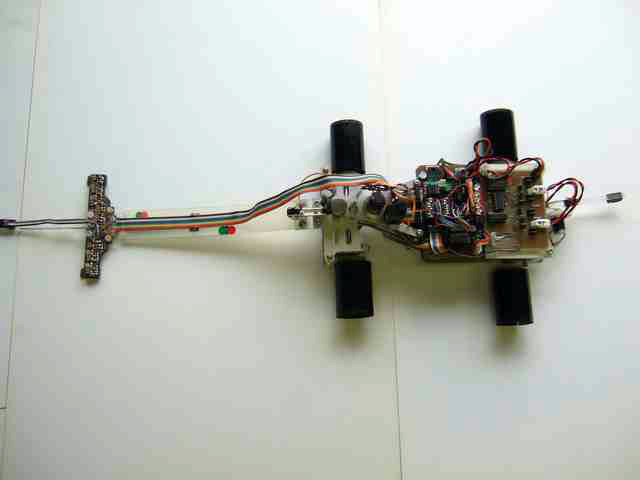
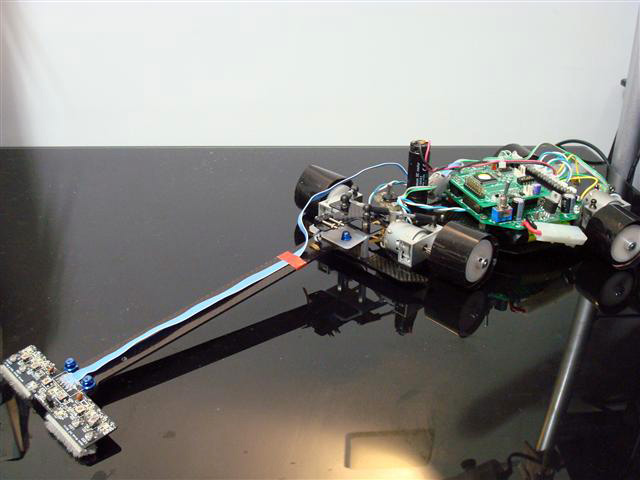
FF-LEAGUE
西村 幸樹
せりかれん
ニッカド8本(千石電商で4本320円)
maxon RE-MAX17×4 ギヤ比 6.25:1
38mm
maxonRE-MAX17 75:1
typeS基板、坂道用リミット×1、ロータリエンコーダ×1、角度制御用ボリューム×1
635g
制御基板を両面基板で自作(モータ5制御、走行用メモリ、データ用メモリ、各入出力端子等)全部1枚で制御してます。
マイコンカーを始めて5年目で初めて4輪駆動車での参加になります。今年はなかなかマイコンカーを触れていないため苦労を体験できていません(T.T)プログラムをとりあえずタイヤが回った!程度で持ってきたため、カーブが曲がれない!左右のタイヤが逆になってる!などセッティングがいまいちつかめず試走は一回も完走しませんでした。あえて言うならこれが一番の苦労した点かも・・・本番でラッキーにも完走しタイムが残せてよかったなぁと思います。地区大会までにはしっかり走れる車を持ち込みたいと思います。
個人参加
阿佐美 斉
MMC09
SANYO エネループ 8本
マクソンRE-max21 56:12 1輪1モータによる4輪独立制御
39mm
マクソンRE16 19:1 を平歯車で 70:20 に減速
デジタル7個(Ver.4)+先読みにデジタル1個
1,130g
昨年と比較して加速とブレーキが向上した。ゼロスタートからトップスピードまでの加速が凄い。0.5秒以内で4.5m/s超え。
軽く仕上げる予定がいつのまにか重くなってしまった。
湘南工科大学 ロボット技術研究会
井上 貴夫
隼FINAL.Ver
予選1走目及びトーナメント:ニッカドを8本、予選2走目:エネループ8本
maxon製RE-max21(221010)に13:60のギヤを用いている。1輪に付き1モータ取り付けている。
前輪39.5mm 後輪38.5mm (車検対策で車輪の径が前後で異なる)
maxon製REmax16(118682)にギアヘッド110322を取り付け20:60に減速している。
走行・マークライン検出用:アナログGP2S40×2、キットに入っているデジタルセンサ×5、ゲートセンサ:PSDセンサ GP2D12、ポテンションメータ(角度センサ):RDC506、距離センサ:OME-100-2MCA(105-015-00)
1,032g(ニッカドバッテリ装着時)
ゲートセンサは当日調整ミスがないようにPSDセンサの値の変化量でゲートの有無を見分けている。PSDセンサの処理時間分だけ、スタートは遅れることになるが、ありえない話だが、ゲートの色が当日変更になったとしてもゲートの高ささえ変わらなければいじる必要のない。この機構を選択した理由は、当日調整ミスしがちな私にとって都合が良かったためである。
本大会よりType-S基板を用いてプログラミングを行ったが、少しでもマクソンモータにやさしい制御にするために駆動周波数を1kHz→10kHzに上げ、実験をしたところFETを大量に燃やしてしまった。FETの在庫と相談の上で本大会では駆動周波数を1kHzに戻した。速度制御のプログラム制御を加えたが、バッテリーの種類などによっては予選2走目で指摘されたようにマシンがバタついてしまうのでブレーキを加えた際にマシンがバタつかない様にプログラムの改良を続けていきたい。また、カーブ中に不要なバックブレーキを加えていたことも判明。次回以降プログラム修復して出場したい。
湘南工科大学ロボット技術研究会
奥村 隆行
ALLEX-RS
SANYO製Ni-Cd×8本 (写真撮影時はエネル−プ×8本)
指定モータ 4個( 1輪につき1個 ) 8.75 : 1
フロント54.5mm リヤ55.5mm
maxon motor RE-max17 40.25:1
アナログ2個、デジタル5個 、先読み用デジタル1個
792g (写真撮影時はエネル−プの為816g)
MCR2004基盤を自作。サイズは20mm×42mm、LCDも付属のものより小さく、金属製の枠が無いものを使用する事で重量を約半分まで減量。iP・iDなどのパラメータはLCDに表示、速度のパラメータは走行時にLCDを搭載しない場合も想定して、自作ドライブ基盤側のLEDへ2進数で表示を同時に行っている。
車体が軽いので、カーブでリヤが振られたり、ブレーキを強く掛けるとスリップする事が多かった。その為、リヤタイヤ内にカウンターウエイトを仕込んだり、バッテリーの位置を移動するなどして得た走行データを元に、前後のモータに回転差を付けるなどの工夫をして安定した走行を再現させた。大会当日は二回ともアウトコース側の右クランクのみ左と認識してしまいコースアウト。次回までにはこういった誤認識への対応も行いたいです。
千葉県立船橋高等技術専門校
志村 賢悟
船橋技専2009
SANYO eneloop 8本
マクソン,118682(RE16 3.2W)+110321(GP16A 4.4:1),1輪1個(計4個)
40mm
マクソン,118682(RE16 3.2W)+110322(GP16A 19:1),さらに60:20で減速
Type.S基板,アナログ2個,デジタル5個
1,100g
低重心設計。各種パラメータをスタート前に設定可能。
ステアリング部の歯車ガタの排除(結局間に合いませんでした)。 そのガタが原因でクロス・ハーフラインの誤検出が多発。ソフトで対策を施しましたが、完全な対策とはなり得ませんでした。センサアームの選定では、軽くたわみの少ないものが適していることに大会中に周りのマシンを拝見して分かりました。今回初めてマイコンカーラリーに参加しました。コース作りからマシン製作まで全て初めてでしたので、右も左も分からず苦労の連続でした。本戦では完走でき、さらに決勝トーナメントに進出できたので当初の目標は達成されました。それと同時に、多くの課題や改善点が見つかりました。
千葉県立船橋高等技術専門校
中島 弘貴
メタルギア
SANYO eneloop 8本
マブチモータ,高校生指定モータ,1輪1個(計4個),60:8
40mm
マクソン,118682(RE16 3.2W)+110322(GP16A 19:1),さらに60:20で減速
Type.S基板,アナログ2個,デジタル5個
1,030g
シャーシ剛性を確保しつつ,穴あけ等で軽量化を行いました。
静電気対策、クランクやレーンチェンジ等の速度調整、そしてカーネームの命名に苦労しました。重量を軽くするため、様々な部分の軽量化を行ったのですが、組み立てているうちに予想外に重くなってしまいました。今回の大会では、調子に乗り速度を上げすぎコースアウトしてしまったので、次からは気をつけようと思います。次回の大会では,優勝を目標にがんばります。
北海道苫小牧工業高等学校
田中 耕一
がんばります北海道
8本(GP社製ニッカド電池)
指定モータ、4個(1輪1モータの独立制御)、56:8
40mm
マクソンRE16 19:1 を平歯車で50:12に減速
TypeS基板、先読みセンサ(デジタル)
974g
電池を車両中心に配置をするために、モータを外側に出してみました。平歯車によるロスもありますが、配置として満足をしています。
クランクやレーンチェンジにおいて、車両のコントロールに苦労をしました。特に、ログと映像との比較から、様々なことを思い描きながら思考を巡らせ、課題を解決することの喜びもマイコンカーの醍醐味と感じています。
写真
所属
お名前
カーネーム
電池の本数
駆動モータのメーカー、型式、個数、ギヤ比
タイヤの直径
ステアリングのサーボ(またはモータ)の型式、ギヤ比
センサの種類(アナログ、デジタル)と個数
重量
特徴
苦労した点
千葉工業大学
西村 健志
ザビエル
Ni-MH eneloop8本
指定モータ 5:1
前輪35mm 後輪36mm
Maxon RE-16 118682 39.6:1
アナログ2個 デジタル4個
960g
ディファレンシャルギヤ機構を用いた後輪のトルクコントロール、マグネシウムを用いたシャーシ、0.7mm厚薄肉ホイール、ステアリングモータ自体をステアリングの回転軸にした点、タイヤ軽を細くしてモータの減速比を下げ効率向上を図った点等です。
回路の設計に苦労しました。ステアリングモータの制御周期を上げるために、回路の試作・実験を重ね何とか大会に間に合わせる事ができました。また車検の際、坂が10度になったので後輪タイヤを少し太くして対処しました。
GTマイコンクラブ
深澤 則正
テスタープロト
ニッカド8本
一輪1個の合計4個 56:8
32mm
マクソンモータ RE16(19:1)+ギヤ比25:80
アナログセンサ2個 デジタルセンサ5個 先読み用デジタルセンサ1個
845g
四輪独立制御の4WD センサ用の回路も含めてモータードライブ基板一枚に納まるようにした。軽量化できる部分は、計量化した。
スピードを追及していくと突然姿勢が乱れることが多く車体にあった制御方法が見つかるまでに時間がかかった。センサをノイズ対策と誤動作防止のために作り直し、新しいルールに適合させるためにシャーシも作り直した。
愛知工業大学
三輪 秀幸
HM09
eneloop 8本
高校生指定モータ6個 60:8
46mm
RE-max17 48:1
アナログセンサ2個デジタル5個 ポジションセンサー8個
約1000g
ポジションセンサによるマシンの位置把握、ワイドトレッド、低重心
手配線によるドライブ基板、ギヤヘッドなしの自作サーボの製作に苦労しました。ログのとり方を工夫し、より多くの情報を取れるようにした。
個人参加
小倉 太郎
オグラケ@
SANYO製Nicd 1100mAh OEM版 8本
駆動モーター:高校生指定モータ 個数:一輪一個の計4個 ギヤ比:60:8
前後とも直径50mm 幅35mm
ステアリングモーター:RE16 3.2w 118682 ギヤ比:約67:1
トレースセンサー:キット品アナログセンサー 坂道検出センサー:後部にリミットスイッチ1つ 速度検出:キット品ロータリーエンコーダー
約730g
最高速の設計を高くすることで、3.5m/sec〜6.0m/sec域での加速度を向上させ、背反となる低速域での加速/減速を、重量を軽くすることで克服した。また車格を大きくとることで、コーナー、車線変更、クランクでの平均速度向上させた。
ほとんど走り込みをすることなく大会に臨む形となり、予選二回目まで完走することが出来なかった。今後の課題として、車体の弱点の検証と安定性の 向上を目指していきたい。
日産テクノマイコンカークラブ
前田 正男
MM07改
ニッカド6本
ラジコンカーミニッツ用、4個(1個/輪)、58:8
40mm
KO PDS2363 を直接駆動
デジタル5個(TypeSセンサーをデジタルとして使用)
560g
軽量、低重心、ステアリングはアッカーマン
手加工による剛性バランス不良のための直進性確保。小型車体へTypeSドライブ基板を搭載するための加工(基板両端を切り詰めてCPU基板の下に搭載)。
砺波マイコンカークラブ(TMCC)
川上 義浩
OPT-PICO
サンヨー NiCd 8本
指定モータ、一輪1個で計4個(4輪独立制御)、60:10で減速
36mm
マクソンRE16(19:1)を平歯車で80:20に減速
アナログ4個とデジタル5個
940g
シャーシーは2mmのカーボン板を使用。モータマウントや減速ギヤは全てジュラルミンにて加工。軽くしたつもりですが、そんなに軽くはなっていない。シンプルな構造で製作しやすい。
プログラムが一番苦労した点ではないでしょうか。昨年の北信越大会のマシンを使い、4輪独立制御の基板をテストするために作ったマシンなので、基板回りの配線が見苦しいままになっています。ニューマシンの製作がが間に合わなかったので、Tカーでの出場となりました。
岐阜県立可児工業高等学校
竹村 洸紀
テスタータケ
8本
指定モータ
38mm
maxon16 19:1+25:60
アナログ2個、デジタル6個
980g
先読みセンサがついており、クランク・車線変更をスムーズに行える。
車高を高くしたので坂のプログラムがうまく動かないことがあった。
岐阜県立可児工業高等学校
大脇 雅也
テスター0
8本
指定モータ
38mm
maxonRE16 19:1+25:60
アナログ2個 デジタル5個
950g
2輪独立制御で重量があり安定した走りをすることができます。
比例値がうまく見つからず、走行出来なかったので何度も繰り返しやり直して値を見つけ出したことが苦労しました。
日本工業大学マイクロコンピュータ研究部OB
佐藤 宏憲
Black Wing
ニッカド電池8本
指定モータ、前2、後4 ギヤ比7.5:1
φ41mm 幅50mm(前後共通)
maxon RE_max21 ギヤ比47.5:1
アナログ:2 デジタル:4 坂道検出スイッチ:1
1060g
精度、剛性重視の設計。モーターハウジングを使用した自作エンコーダ。釣竿センサーバー。シャーシに軽量かつ強度のあるローコスト材質を使用。2輪独立制御で重量があり安定した走りをすることができます。
ルール改正で坂道でシャーシが当たることが分かったので、部品数点を作り変えた。その他は全国大会から変更せずに出場した。4月から社会人になったため練習が極端に減ってしまった。前日の試走会では珍しく1度も完走できず、後輩と夜遅くまで調整して本番では全て完走でき、大変満足のいく結果になった。比例値がうまく見つからず、走行出来なかったので何度も繰り返しやり直して値を見つけ出したことが苦労しました。
株式会社 三洋メディコムソフトウェア
山口 弘行
さめす鮫吉G4
三洋電機 eneloop 8本
指定モータ 4個 8:70
45mm
KO-PROPO PS-2174FET
センサ基板Ver.4、日本電産ネミコン製ロータリーエンコーダ、坂道検出スイッチ
891g
疑似アッカーマンリンクによるステアリング機構と手作り感あふれるローテクな車体。サーボの搭載方法についていろいろ試作した結果、ダブルデッキに落ち着きました。アッパーデッキは安価で軽量な発泡塩ビ板を使用しています。簡易な車体構造なのでユニットごとに部品の取り外し・交換ができ、コネクタの接続やディップスイッチの設定なども手の届きやすいように設計しました。7セグLEDを2個搭載して、走行状態の表示や各センサーのチェックなどを行えるようになっています。
不慣れな工作の連続でカッターナイフで手を切ったり、けがき針で指をけがいたり、ヤスリで指を削ったりといろいろ痛い思いをしながらつくり上げました。そういった意味ではまさに製作者の涙と汗と血が染みこんだマシンです。稚拙な工作技術でつくった割には良く走ってくれるのですが、普段開発しているコースが畳の上にプラ段をしいた全周7,8メートルほどの簡易コースなのでどうしても本物のコースと比べるとグリップなどが異なり、当日はプログラムの変更が急遽必要になるのが毎回苦労します。今回は試走の段階でレーンチェンジがうまくいかず、予選開始直前までプログラム修正を行い非常に苦心しました。
写真
所属
お名前
カーネーム
電池の本数
駆動モータのメーカー、型式、個数、ギヤ比
タイヤの直径
ステアリングのサーボ(またはモータ)の型式、ギヤ比
センサの種類(アナログ、デジタル)と個数
重量
特徴
苦労した点
日本工学院テクノロジーカレッジ
飯塚 剛
ABIT
三洋電機 eneloop 8本
maxon RE-16 118685、ギヤヘッド 4.4:1 110321
39mm
maxon RE-16 118685、ギアヘッド 19:1 110322+80:40
シャープ GP2S40J0000Fをデジタルで使用×5、アナログで使用×2
880g
駆動モータやバッテリーを車体の中心部にできる限りまとめて配置し、重心を安定させています。クロスライン、ハーフラインの検出方法を工夫して、多少角度がついて進入しても正確に検出できるようにしました。走行用プログラムだけでステアリングのセンター調整やエンコーダの動作チェック等ができるようにプログラムを組みました。
今回の車体は去年と同じものですが、坂道の角度が10°に変更されたことにより、タイヤ径を大きくせざるを得なくなり、結果バランスが狂ってしまいました。
(株)三洋メディコムソフトウェア
藤坂 浩史
さめさめふぁいや4号
ニッカド 8本
指定モータ4個 8:70
44mm
maxon RE-16+GP-16(1:19.2) 50:20
センサ基板Ver4
860g
アッカーマン方式 後輪駆動(1輪2モータ)
職場に用意されている簡易コースと実際のコースではグリップの差があり、本番コースでは相当速度が上げられる為、試走で最適値に調整しなおすのが大変です。また職場コースが狭いため、マシンクラッシュが頻発し、すぐにステアリン グ機構や駆動部分にガタが出てしまい何度も部品を作り直しています。
宮崎県立佐土原高校OB
松原 明彦
sonic1
SANYO Nicd 1100mAh × 8
RC260RA(指定モータ) ×4、56:8
40mm
maxon 118682 4.5V 3.2W +maxon 110322(19:1) + 70:20
Type.S アナログ2、デジタル5
735g
カーボンシャーシを用いた軽量設計。センサ・ドライブ基板にType.S、エンコーダにはキットを用いたシンプルな構成。可能な限り部品点数を減らし、低重心化を目指した。
工作機械がボール盤と糸のこ、ヤスリ程度しかないので、いかに精度を出せるか!?という点で苦労した。また、スケジュール管理の甘さで大会まで十分に調整出来なかった事と、プログラミング技術が乏しいので次回大会までしっかり走り込んでソフト面を詰めていきたい。
写真
所属
お名前
カーネーム
電池の本数
駆動モータのメーカー、型式、個数、ギヤ比
タイヤの直径
ステアリングのサーボ(またはモータ)の型式、ギヤ比
センサの種類(アナログ、デジタル)と個数
重量
特徴
苦労した点
Copyright (C) ジャパンマイコンカーラリー実行委員会 All Rights Reserved.