【一般の部 ベスト3】
優勝
 |
| 丸木雅大さん「青嵐」 |
| 内 容 |
詳 細 |
| 全 長 |
280mm |
| 全 幅 |
125mm |
| ホイールベース |
120mm |
| 重 量 |
695g |
| ラインセンサ |
アナログ(受光素子 TPS703×2、発光素子
TLN103A)
デジタル(変調IC S7136、発光素子 TLN103A)×2 |
| 駆動モータ |
駆動モータ:マクソンモータ(118712)
サーボモータ:マクソンモータ(118727)
ファンモータ:マクソンモータ(118730) |
| 駆動方式 |
後輪駆動 デフギヤ |
| 駆動系電圧 |
駆動モータ:電池8本9.6V
サーボモータ:電池8本9.6V
ファンモータ:17V(昇圧) |
| 制御系電圧 |
駆動電圧を三端子レギュレータにより降圧 |
| ギヤ比 |
駆動モータ:42:8
サーボモータ:31.5:1
ファンモータ:直結 |
| タイヤ、ホイール |
直径:28mm、幅:10mm
作り方:直径20mm、幅10mmのアクリルを直径28mmの型に入れてシリコンゴムを流し込む。 |
| 特 徴 |
■本体
- 回転する部分全てにボールベアリングを使用しているので滑らかな動作。総数は24個。
- デフとピニオンのギヤ比は42:8で変更できないためタイヤの直径で速度調整を行いました。直径30mmの型があったのですが28mmが良いと考えたので直径28mmの型を製作しました。最大加速度
13.8m/ss, 最大速度 6.1m/s, 停止状態から4m/sまで0.5sとなっています。
- シャーシ下の空気を吸い出すことで、車体をコースに押し付けてタイヤのグリップ力を向上させます。静圧は手動により調整可能で、大会のときは1300gになっていました。タイヤに加わる荷重は車体の695gと1300gで約2000gになります。スカートは家具スベールを使用して摩擦を減らしています。
■プログラム
- タイヤが逆回転しているか判断してブレーキをする。
- センサの操舵角が変わると速度が変化する。定数テーブルを作り、それに変数を掛けて使用している。
- アナログセンサの入力を位置に対してリニアに補正している。"s1-s2"は±10mm位まではリニアだがそれ以上は曲線なのでセンサ出力が判断できる±20mmまでをプログラムでリニアに補正している。通常20mmもコースを外れないので意味があるのかは別問題。
 |
| ※クリックすると拡大表示します。 |
- 加速度は目標速度を基準に考えるが恐らくほとんどフルパワー。ブレーキは速度差に比例して最大PWM50%の逆回転。クロスラインを判断後50cm進んでからブレーキをして5m/sから0.6m/sまで50cmでできます。しかしクランクを0.6m/sで進むのは遅すぎた気がします。去年の車でも1m/sだったのに。
|
| 苦労した点 |
■本体
- 部品の作り直しが多かった。ファンは2回作り直した(ファンを土台から外すときに割れた。切削中に土台から外れた)。シャーシも2回作り直した(土台が傾いていて切削中に穴が空いた。軸穴の位置がずれて組み合わさらない)。
- 速度が速いので坂でジャンプする。物理法則なのでどうすることもできない。
- 向心力を上げるには摩擦か垂直効力の増加です。自分はタイヤを6輪にして摩擦を上げるかファンを搭載して垂直効力を上げるか考えたのですが6輪はタイヤのバランス調整が難しいので後者を選択しました。遠心力は質量に比例するため車体を出来るだけ軽く製作して静圧と車体重量の差を大きくすることが重要です。静圧を大きくするためには吸引モータに多くのエネルギーを使えばよいのですが使用可能な電源が単三電池8本となっているため無闇に静圧を大きくすることが出来ません。このトレードオフの関係が設計の難しい所でした。またファンは軽くて小さいファンがなかったので製作しました。かっこ良さでは軸流ファンなのですが、風量が零のとき最大負荷となることや効率が良くないことから遠心ファンを使うことにしました。遠心ファンは風量が零のときの負荷が最小になるので空気が漏れないようにすればモータにあまり電流を流さなくても高い圧力を得ることができます。ちなみに自分の車は空気が漏れていないときは1A以下の電流ですが漏れているときは3Aを超えたと思います。このファンは厚み10mmのアクリル材から削りだして上に薄い板材を接着して真中に穴を空けて完成です。
■プログラム
- 坂を越えた後よく車が停止する現象が起こりました。原因は坂の角度が変わる場所でセンサが浮いてしまい、センサの出力がなくなるためでした。センサ出力が弱いときにはコースアウトと判断して動作を停止する様になっていたのです。これは大きな問題でした。コースアウトしても動くようにすると車が障害物に当たる恐れがあるからです。結局良い方法がなかったので0.2秒間白線を判断できないとき停止するようにしました。
|
| 感 想 |
今年の大会で印象に残ったのは自分の他にも吸引の車体がいたことです。吸引の車体はまだ誰もやっていなかったので有利だと考え製作しました。なぜ有利かといいますと最初だったら中途半端な吸引装置でも他の人が使っていないので性能の差が大きくなるためです。相撲ロボットがいい例だと思います。吸引の車体が他にもいるという現実を受け入れたときには焦りを感じました。なぜなら自分の車体は一つの設定でしか練習走行していないため速度を上げることができません。トーナメントで三豊工業高校の先生のタイムがどんどん早くなってきていたときはどこまで近づいてくるんだと思いました。追われるのは嫌です、追う方が楽でいいです。そんなことを感じた大会でした。
※吸引機能を用いたマシンは2004大会から禁止されました。 |
|
 |
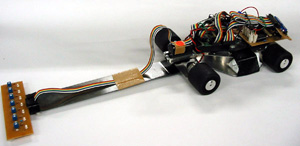
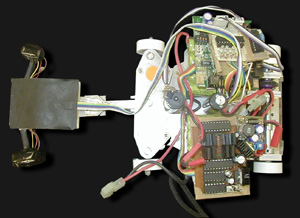 機体がコンパクトに作られている。その分、回路が大きく感じてしまう。 機体がコンパクトに作られている。その分、回路が大きく感じてしまう。 |
|
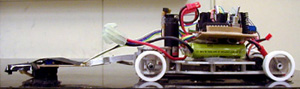 横から見たところ。出来るだけ低く作り重心を低くしている。他のマイコンカーに比べ小さく薄い車輪。 横から見たところ。出来るだけ低く作り重心を低くしている。他のマイコンカーに比べ小さく薄い車輪。 |
|
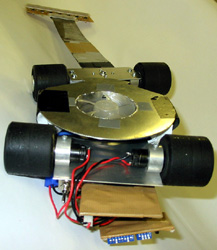
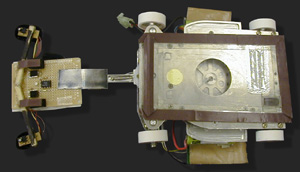 裏から見たところ。吸引ファンとカグスベールで作ったスカートが見える。この機構でマイコンカーをコースに吸い付け、グリップを増やしている。 裏から見たところ。吸引ファンとカグスベールで作ったスカートが見える。この機構でマイコンカーをコースに吸い付け、グリップを増やしている。
※吸引機能を用いたマシンは2004大会から禁止されました。 |
準優勝
|
| 香川県立三豊工業高等学校教師 瀬尾文隆さん「WINNING
RUN」 |
| 内 容 |
詳 細 |
| 全 長 |
550mm |
| 全 幅 |
170mm |
| ホイールベース |
160mm |
| ラインセンサ |
変調型フォトセンサ 浜松フォトニクスS7136
7個 |
| 駆動モータ |
マクソンモータ3.2W 4.5V |
| 駆動方式 |
4輪駆動(4個使い) |
| 駆動系電圧 |
電池6本7.2V |
| 制御系電圧 |
電池2本を昇圧して5Vを生成 |
| ギヤ比 |
4.4:1のギヤヘッドモータ |
| サーボ |
近藤科学(株)PS-2173FET |
| サーボ電圧 |
電池6本7.2V |
| タイヤ、ホイール |
旋盤による削り出し自作 φ45mm
スポンジタイヤにシリコンを薄く塗っている |
| 特 徴 |
コースから少し浮かせた吸引方式で走行させている。4輪駆動である。重量が重い。 |
| 感 想 |
準優勝できて大変嬉しい。賞金は札幌にて仲間全員で全部使って帰ってきました。来年もぜひ行きたい。丸木さんのマシンのスピードは想像以上で驚いた。来年は大雑把な制御でなくロータリエンコーダを入れ細かい制御に挑戦したいと思っている。 |
|
|
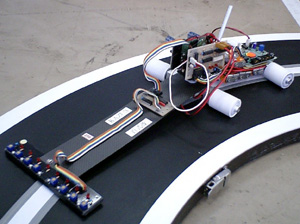
 長いアームが特徴。ディップスイッチによりパラメータを設定できるようになっている。 長いアームが特徴。ディップスイッチによりパラメータを設定できるようになっている。 |
|
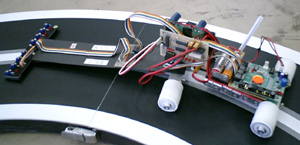
 横から見たところ。 横から見たところ。 |
|
 裏から見たところ。吸引ファンが見える。優勝した丸木さんの様なスカートはなく、吸引力は弱めになっている。ファンモータは高校の部で指定されているマブチモータを使用している。 裏から見たところ。吸引ファンが見える。優勝した丸木さんの様なスカートはなく、吸引力は弱めになっている。ファンモータは高校の部で指定されているマブチモータを使用している。
※吸引機能を用いたマシンは2004大会から禁止されました |
3位
|
| 兵庫県立相生産業高等学校教師 清水一豊さん「百式」 |
| 内 容 |
詳 細 |
| 全 長 |
470mm |
| 全 幅 |
前輪幅170mm 後輪幅150mm |
| ホイールベース |
150mm |
| 重 量 |
950g |
| ラインセンサ |
キットと同じ基板 S7136×8個 |
| 駆動モータ |
マクソンモータ RE16 118682
4個 |
| 駆動方式 |
四輪駆動 |
| 駆動系電圧 |
6.5V〜7.5V |
| 制御系電圧 |
駆動電圧を三端子レギュレータにより降圧 |
| ギヤ比 |
4.4:1のギヤヘッドモータ |
| サーボ |
近藤科学(株) PDS-2173FET |
| サーボ電圧 |
6.5V〜7.5V |
| タイヤ、ホイール |
自作 直径30mm 幅45mm 厚5mm
型取りシリコンタイプ |
| 特 徴 |
4輪駆動となっています。プログラムはキットのままです。 |
| 苦労した点 |
モータの取り付け方法 タイヤ車検対策 |
|
|
 標準キットVer2のドライバ基板、センサ基板を使用している。白い棒は電源スイッチ。OFFし易いように配置している。 標準キットVer2のドライバ基板、センサ基板を使用している。白い棒は電源スイッチ。OFFし易いように配置している。 |
|
 幅広のタイヤが特徴。 幅広のタイヤが特徴。 |
