【高校の部 上位入賞者】
優勝
 |
| 神奈川県立磯子工業高等学校 水野匠くん「韋駄天磯工」 |
| 内 容 |
詳 細 |
| 全 長 |
約510mm(アース線は除く) |
| 全 幅 |
約260mm |
| ホイールベース |
約185mm |
| ラインセンサ |
4個(SHYRP製GP2S40) |
| 重量 |
1267g |
| 駆動方式 |
後輪駆動 6個(後輪1つに3つのモータ) |
| 駆動系電圧 |
ニッケル水素電池(2500mA) 8本 |
| ギヤ比 |
70:8 |
| サーボ |
maxonモータ RE16 4.5V 約80:1 |
| サーボ電圧 |
ニッケル水素電池(2500mA) 8本 |
| タイヤ、ホイール |
・前輪タイヤ
直径;40mm 幅;60mm
・前輪ホイール
材料;アルミ 直径;30mm 内径;26mm 付根の肉厚10mm
・後輪タイヤ
直径;52mm 幅;60mm
ホイール
材料;アルミ 直径;42mm 内径;36mm |
| その他 |
水野くん、本人からレポートをもらいました。
→PDFファイル(1.22MB) |
|
 |
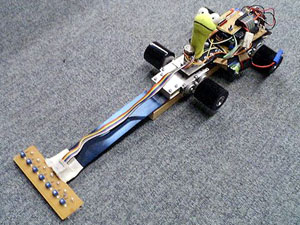
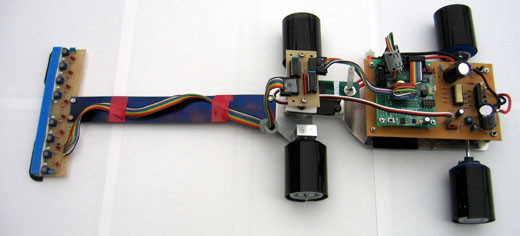
 センサアームは、発泡塩ビ板をモデラーで削りだしました。リセット防止のため半田吸い取り網(銅線)をフレームにつけています。エンコーダを搭載して速度制御や距離の測定に使用しています。(レポートより抜粋) センサアームは、発泡塩ビ板をモデラーで削りだしました。リセット防止のため半田吸い取り網(銅線)をフレームにつけています。エンコーダを搭載して速度制御や距離の測定に使用しています。(レポートより抜粋) |
|
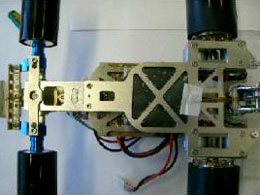 本体フレーム(板)はCADで設計して、モデラーで削りだしました。フロントフレームは30×30のアルミの角材からフライス盤で削りだしました。(レポートより抜粋) 本体フレーム(板)はCADで設計して、モデラーで削りだしました。フロントフレームは30×30のアルミの角材からフライス盤で削りだしました。(レポートより抜粋) |
|
 ラインセンサーはアナログで見ています。内側の2つのセンサは中央ラインの検出に使っていますが、黒と灰色のラインの境目にちょうどセンサがくるような配置になっています。外側の2つのセンサーはクランク用です。ちょっとだけ早くクランクが発見できるように内側より前に出しています。また、通常走行では中央ラインにかからない配置になっています。(レポートより抜粋) ラインセンサーはアナログで見ています。内側の2つのセンサは中央ラインの検出に使っていますが、黒と灰色のラインの境目にちょうどセンサがくるような配置になっています。外側の2つのセンサーはクランク用です。ちょっとだけ早くクランクが発見できるように内側より前に出しています。また、通常走行では中央ラインにかからない配置になっています。(レポートより抜粋) |
|
準優勝
|
| 香川県立三豊工業高等学校 谷直哉くん「マグナムセイバー」 |
| 内 容 |
詳 細 |
| 全 長 |
570mm |
| 全 幅 |
200mm |
| ホイールベース |
170mm |
| 重 量 |
1107g |
| ラインセンサ |
変調型フォトセンサ 浜松フォトニクスS7136 7個 |
| 駆動方式 |
4輪駆動 前輪後輪一輪に対して2モータの計8個使用 |
| 駆動系電圧 |
電池8本9.6V |
| ギヤ比 |
56:8 |
| サーボ |
マクソンモ−タを使用
ギヤヘッドで19:1さらにギヤで50:20に減速 |
| サーボ電圧 |
駆動系電源と同じ |
| タイヤ、ホイール |
旋盤による削り出し自作 φ40mm スポンジタイヤの上からシリコンシートを貼っている |
| 特 徴 |
シャーシに厚み1.5mmのカーボンを使用 |
| 苦労した点 |
大会前日に基板が燃えたり、コースアウトによるマシンの破損等があり大変でした |
| 感 想 |
一緒に参加した先輩と後輩が敗退したので絶対に負けられないという気持ちで決勝に臨みました。結果は100分の7秒差で負けてしまいとても悔しい思いをしました。また、三豊工の連覇記録を止めてしまったことも残念です。しかし今年は一度もコースアウトせず完走できたのでよかったです。これまでお世話になった先生や部員の方、頑張って走ってくれたマシン、みんなに感謝したいです。またこの悔しさをバネにこれからも頑張っていこうと思います。来年は優勝を狙います。 |
|
|
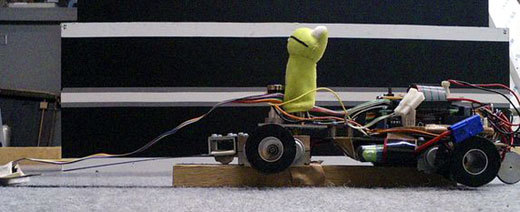
 しなやかなで長いセンサアーム。1.1kgと重いがモータ8個による制御で重さを感じさせない。センサは7個でポート7へ、ポート7のもう1ビットはステアリングの角度検出用ボリュームにつながれていてA/D変換器で角度を検出している。 しなやかなで長いセンサアーム。1.1kgと重いがモータ8個による制御で重さを感じさせない。センサは7個でポート7へ、ポート7のもう1ビットはステアリングの角度検出用ボリュームにつながれていてA/D変換器で角度を検出している。 |
|
旋盤による削り出しのホイール、タイヤ。 |
|
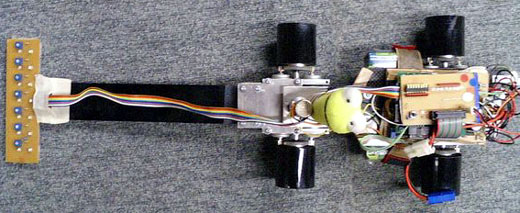
ディップスイッチを追加して、細かい設定をしている。電池はニカド電池8本を半田付けによりパック化している。シャーシはカーボンを使い軽量化。 |
|
3位
|
| 岡山県立東岡山工業高等学校 難波泰規くん「マッキー」 |
| 内 容 |
詳 細 |
| 全 長 |
490mm |
| 全 幅 |
240mm |
| ホイールベース |
170mm |
| ラインセンサ |
ディジタルセンサ S7136 8個 |
| 駆動方式 |
後輪駆動 1輪1個 合計2個 |
| 駆動系電圧 |
9.6V |
| ギヤ比 |
11.6:1 |
| サーボ |
KOサーボ PDS2123 |
| サーボ電圧 |
7.2V |
| タイヤ、ホイール |
Φ42mm |
| 特 徴 |
できるだけ重心を低くするため、シャーシの上にギヤボックスを置いている。モータドライブを自作し、3端子レギュレータ2個とモータドライバを一体化して、配線をすっきりさせている。ディップスイッチによる速度設定は、70%から100%まで、2%きざみに細かくしている。 |
| 感 想 |
予選を突破して、翌日の決勝トーナメントに出場するというのが大会前の目標でした。前日の試走は5回走行し、すべてコースアウトし、完走は絶望的の状態でした。予選から3位決定戦まで6回走行をし、すべて完走できたのがうれしいです。3位決定戦では100%設定しマッキーのベストタイムを狙いましたが、バッテリの消耗により平凡なタイムに終わりました。でも全国大会で3位になれて最高です。 |
|
|
シンプルな作り。センサのボリューム部分を補強材で強化している。練習中、激突したときにボリュームが良く取れてしまうが、それを防止している。 |
|
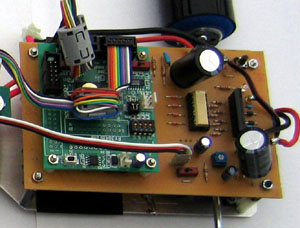 CPUボードの下は、自作のマザーボード。一体化されており配線が非常にすっきりしている。フラットケーブルにはノイズフィルタを付け、外部からのノイズを防いでいる。 CPUボードの下は、自作のマザーボード。一体化されており配線が非常にすっきりしている。フラットケーブルにはノイズフィルタを付け、外部からのノイズを防いでいる。 |
|
 ホイールはフィルムケースを使用。それにスポンジとシリコンシートを巻いている。 ホイールはフィルムケースを使用。それにスポンジとシリコンシートを巻いている。 |
