MCRファン倶楽部
>>
写真集
>>
横須賀大会2008 決勝トーナメント進出マイコンカー
2007.09.06更新
横須賀大会2008 決勝トーナメント進出マイコンカー
2007.08.26
横須賀大会2008の決勝トーナメント進出者のマイコンカー写真をUPしました。紙面の都合上、省略させていただいた部分があります。ご了承ください。
写真
所属
お名前
カーネーム
電池の本数
駆動モータのメーカー、型式、個数、ギヤ比
タイヤの直径
ステアリングのサーボ(またはモータ)の型式、ギヤ比
センサの種類(アナログ、デジタル)と個数
重量
特徴
苦労した点
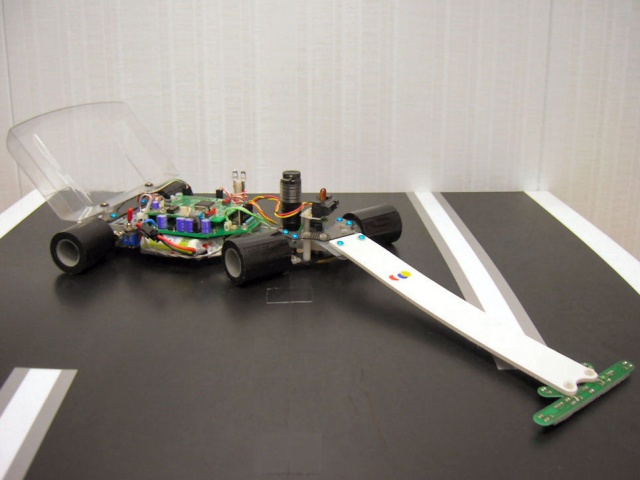
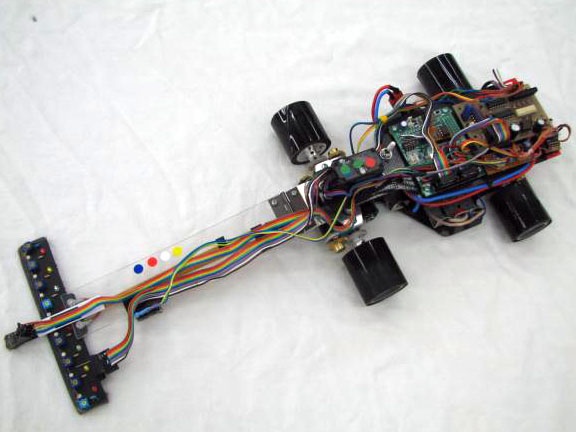
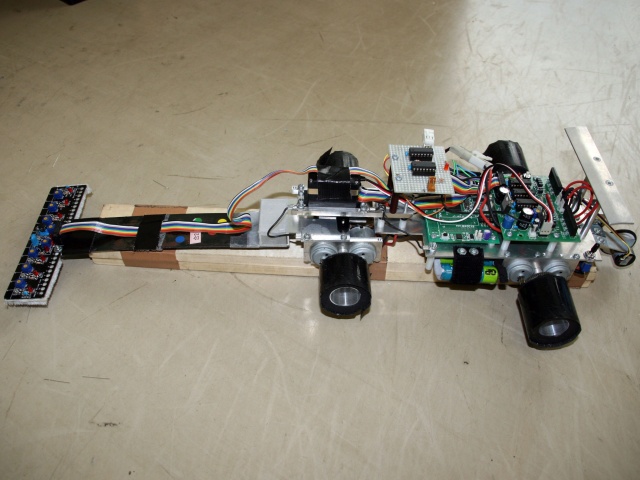
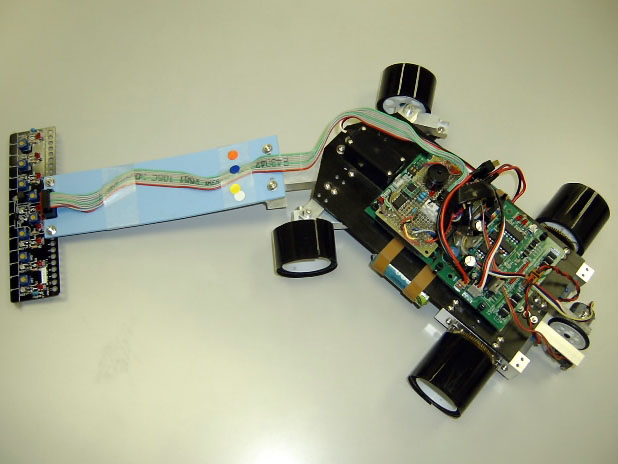
個人参加
徳永 弦久
SPANGLE
SANYO製ニッカド×8本
maxon製 RE-max21×2個 54:14
36mm
maxon製RE16 ギヤヘッドど合わせて約60:1
アナログ×7個
約710g
トレース用センサに平行して取り付けたもう一組のセンサを利用してコーナ旋回円を予測し、目標の軌道を走行するように駆動力を制御している。
部品数や加工数を増大させないメカ設計。ラインセンサやポテンショメータ等のノイズ対策及び、クロスライン、ハーフライン誤検出時やライントレース失敗時のフェールセーフ。
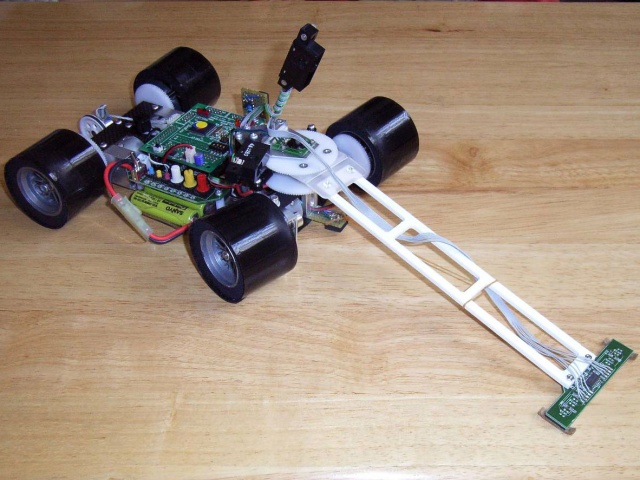
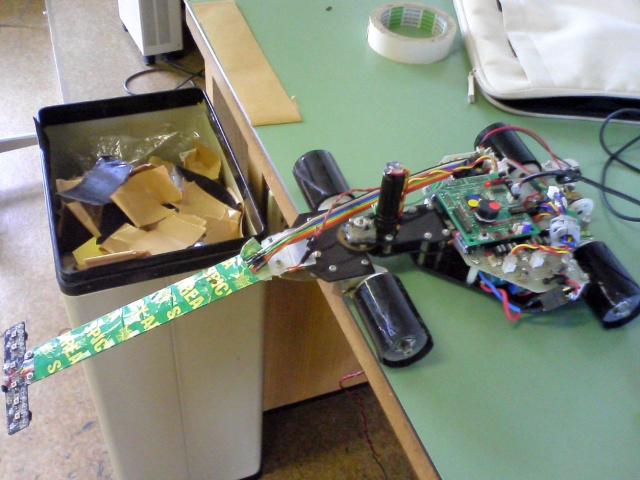
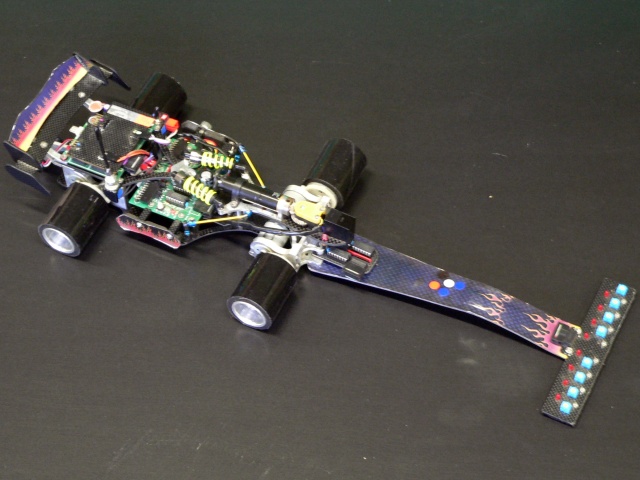
日産自動車株式会社
河野 純也
FRAGILE007
ニッカド8本
指定モータ 1輪1個の計4個 9:1
55mm
maxon製RE-MAX17 40:1
ライン用アナログ3個、マーカー用デジタル2個、先読み用デジタル1個、坂道用アナログ1個、ジャイロアナログ1個
759g
センサーとステアの別駆動方式、ジャイロを用いた動的姿勢制御、大きなタイヤ
全国大会で脱輪したレーンチェンジの確実性と速度アップ。結局どちらもあまり向上せず、予選の1回目は脱輪してしまった。現在全国大会に向けて再改良中。
※2007.09.06追加
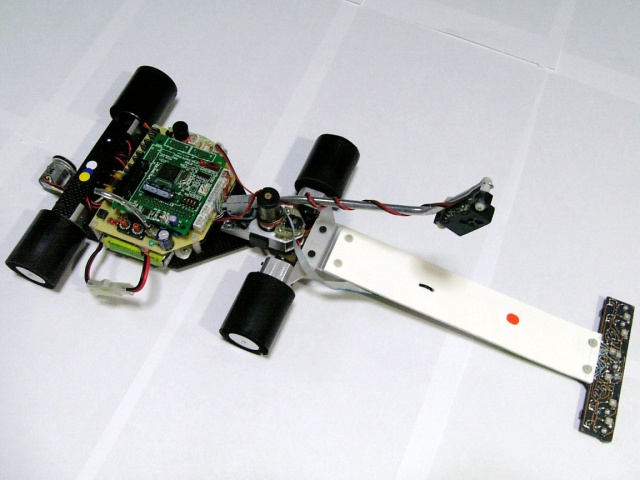
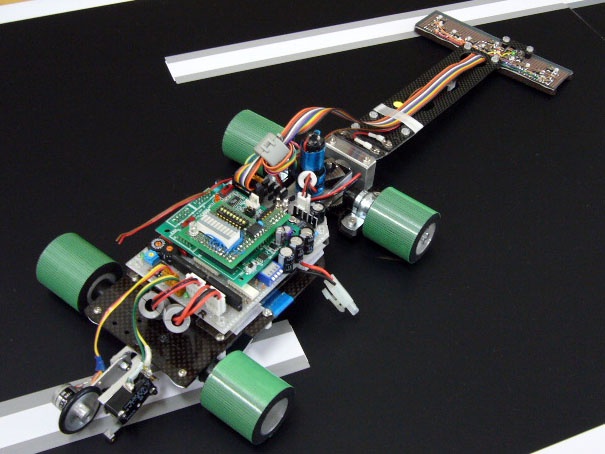
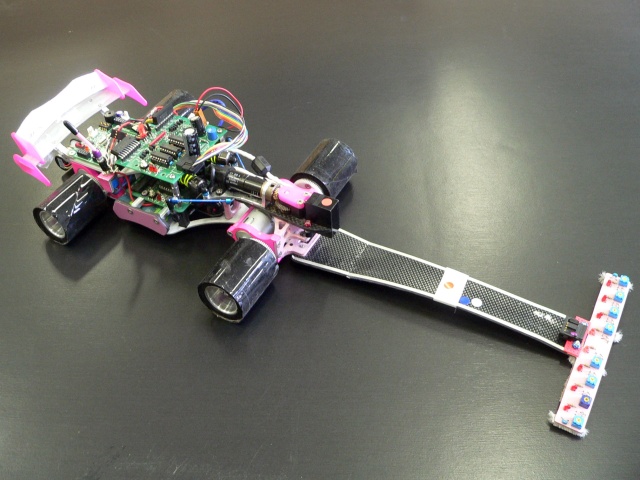
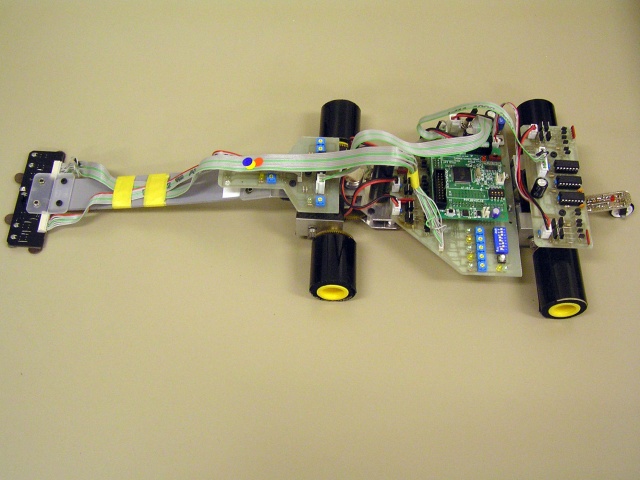
湘南工科大学 ロボット技術研究会
黒川 旭
GodArthur3
SANYO製ニッカド×8本
maxon製 RE16-118682 4個 4.4:1
38mm
Portescap 16G88+R16ギヤヘッド(22:1) 66:1
アナログ2個、デジタル5個 、先読み用デジタル1個
900g
ギヤヘッド付きモータを利用したインホイールモータ・無駄を省いた低重心車体。部品一つ一つにネジを切り、ナットを使用せずに固定が可能。直線、カーブ、車線変更、クランクの速度をDIPSWにより0.1m/s単位で設定可能。
ステアリング周りのバックラッシュを極力減らし、ライン追従性の向上を目指しましたが、機械加工・プログラム共に苦労しました。カーブ・車線変更での速度4m/s以上を目標に調整したが、安定化との両立が出来ず、間に合わなかった。4輪独立制御を行う為に新基板の製作を考えましたが、時間の関係上断念しました。全国大会までには、4輪独立制御を実現させたいと思います。
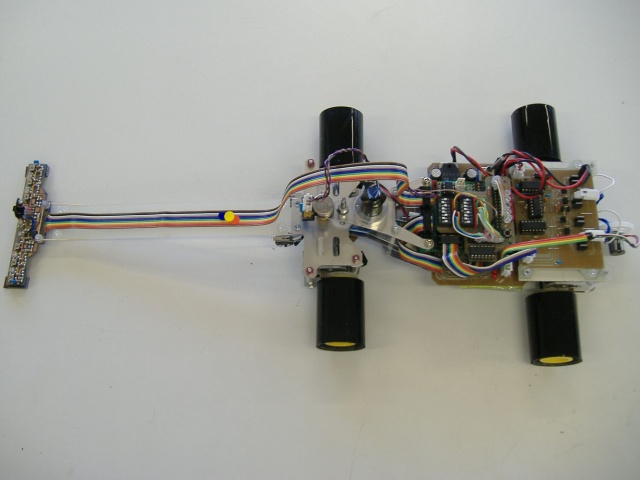
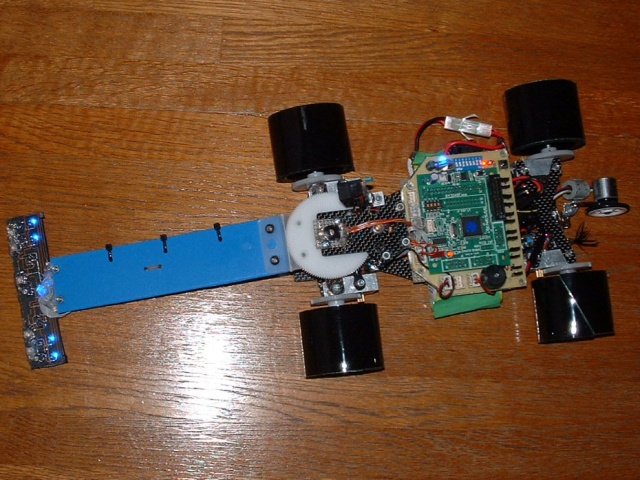
福岡県立福岡工業高等学校
井上 康
ウォタースキッパー
ニッカド電池8本
指定モータ4個 56:8
37mm
maxon製 RE17 53.3:1
アナログ3個(1個はディジタルとして使用)、デジタル4個
705g
軽量・高剛性を目標に設計し、たわみ、ねじれを極力減らしました。
加工精度を上げ、シャフトと軸受けのガタを限りなく減らすことにより、高剛性ボディの特性を活かすことができました。予想以上によく走りましたが、横須賀大会で改良点をいくつか見つけました。
※2007.09.06追加
岐阜県立岐阜工業高等学校
所 洋一
テスター1056
8本
指定モータ 1輪1個、計4つ 54:8
37mm
maxon製 RE16 3.2W 7V ギヤード19:1+60:25
アナログ2個、デジタル5個
943g
自前で両面基板のセンサを作り、軽量化、修理のしやすさを図りました。基板もなるだけリード線での配線が少なくなるように、1枚の基板にほぼすべての回路を収めました。四輪独立制御のための基板は別になっていて、これをはずせば最小限の回路で二輪独立制御にすることもできます。マクソンモータの位置をできるだけ下げ重心に気を使い、サーボギアのバックラッシュがおきないように、マクソンモータの軸受けとして下からベアリングで受けるようにしました。
特に足回りのサイズにこだわり、ホイールベース、トレッド、タイヤ径を決めるために、少しずつ寸法を変化させデータを取ったり、いろんな素材を試しました。
NAKAOKA Family
中岡 進
STIKK
エネループ7本
maxon製 RE16-118682 4個 4.4:1
40mm
SANWA ERG-WRX
キットデジタル8個、先読みデジタル1個
978g
すべてキットを使用しています。(モータドライブ基板Ver.2、センサーVer.3、プログラムkit04)
専門が機械なので未だに電気系、プログラム共に大変苦労しています。特にリセット病は毎年苦労しました。しかし、素晴らしいキットのおかげでなんとか走らせています。市販サーボとキット部品で滑らかで最速を目指したいと思います。
愛知工業大学
三輪 秀幸
HM08
ニッカド1000mA 8本
指定モータ、4WD(4輪独立ではない)、1輪1モータ、56:8
38mm
maxon製 RE-max16 4.5W 57:1
アナログセンサ2個、デジタル5個
約850g
モータは高校生指定モータ。回路もキットVol.3を手配線にて製作し、Hブリッジをひとつ増やしただけです。車線変更での減速は最低限せず、直線のターゲットと同じ速度で走行している。
ハードに関しては、タイヤを作るとき以外の作業は全部ボール盤で加工をおこなった。ステアリング部のギヤのかみ合わせはNCフライス盤のように精度が出ないので、長穴にしてバックラッシュをつめれるように製作した。ソフトに関しては、ログをとりながら、何度も何度も走行させ部分的に検証をしつづけた。自分で演算式や、ある条件になったらある動作などを決めてやっているうちに、演算が狂ったり条件がかみ合わないなど、バグを取るのにとても苦労した。
チーム三光
鈴木 友和
GRV−07
ニカド GP1000mAh 8本
マブチ(高校生の部指定)4個 60:8
後輪36mm 前輪34mm
SANWA ERG-RZ(オーバードライブ)
センサ基板Vol.3
630g
後輪が1軸。ホイルはフィルムケースでタイヤはフェルトを使用。シャーシが中空ポリカ、軽量化のためボルトナット(3mmが10組、2mmが18組)の数が少ない。スペーサもジュラコンの15mmを2本のみ使用。基盤類はシャーシなどに1mm圧の両面テープで固定。
ハード面では機械工作精度が低いのでパーツの作り直しが多かったが、以前よりはまっすぐ走る車体に仕上がった。ソフト面ではボトルネックになっているクランクや急カーブの調整を中心に取り組んだ。また、車線変更を直線と同等の速度で通過できるように改良した。
砺波マイコンカークラブ(TMCC)
番土 隆
若鷹
三洋ニッカド電池8本
maxon製REmax21 後輪駆動片輪1個、合計2個、14:50
40mm
maxon製REmax21、29:1
アナログセンサ2個 デジタルセンサ5個
910g
センターピボットでステアリングモータが直結
センサをいろいろと試して、直線からカーブの検出を確実にできないものかと苦労しました。センサーのデジタルを増やしたのでセンサーの情報パターンが増えて、確実になった部分が多いのですがまだまだ煮詰める時間がなくて、本番で誤動作したところがありました。
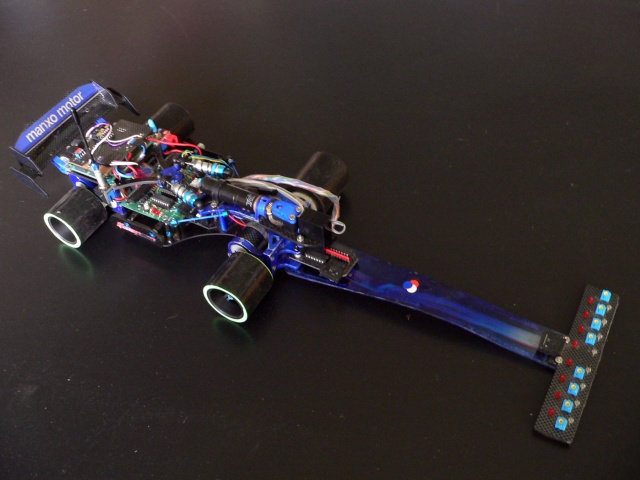
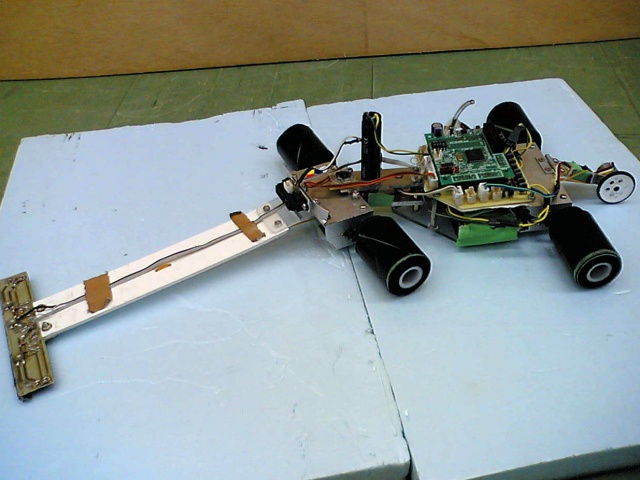
日産テクノマイコンカークラブ
前田 正男
MM07
6本
HPI マイクロハイパワーモータ(ラジコンカー用)、後輪2個、58:8
30mm
SANWA RS995
デジタル4個
495g
軽量化とデジタルセンサー4個での制御。前輪はサスペンション付き、ステアリングはアッカーマン機構となっている。
工作機械が無く(簡易ドリルのみ)手加工による製作のため、各輪のジオメトリー、剛性バランスに不安がある。軽量化は最も簡単な性能向上策と考え、不要な部品・部位の削除を徹底して行った。センサ個数削減(計量化)によるラインの誤読取り(幅がないためハーフラインを読み飛ばす等の)対応にプログラム作成の大半を費やした。
あざ〜すレーシング
高橋 久志
野人我ーZ 貴族
GP製 1000mAhニッカドバッテリー8本直列
マブチ 高校生指定モーター フロント2本 リア4本、60:8
42mm
maxon RE16+GP16A 38:1
キット標準センサ(デジタル) 8個
990g
横置きステアリングモータ・カーボンリムホイール・スタビライザー&ショックアブソーバ
従来の設計を見直しタイヤ及び駆動部の設計変更を行いましたが、思うように軽量化が進まず目標重量まで到達できませんでした。更なる設計見直し及び素材変更による軽量化作業が必要なようです。
※2007.09.06追加
個人参加
阿佐美 斉
MMC08
GP製 1000mAh 8本
maxon製RE16 4.5V 4個 4.4:1
38mm
maxon製RE16 4.5V 約70:1
デジタル11個そのうちの3個はクロスライン、ハーフライン検出専用
1000g
昨年よりも低重心、上りと下りを検出している
デジタルセンサの間隔をキットよりも狭く配置したためクロスライン、ハーフラインの見極めが困難となった。クロスライン、ハーフライン検出専用のセンサを追加した。坂道検出用のリミットスイッチが反応するタイミングを考慮したプログラム。制御基板をユニバーサル基板で製作しているので誤配線等に注意をしなければならなかった。
個人参加
猪熊 伸彦
熊九郎
8本
指定モータ 1輪につき2個合計8個 56:8
40mm
KO2463デジタルサーボ
センサ基板Ver.4(コースデジタル4個+スタートバー1個)
1103g
重くて、ガッシリしている。
4輪の接地具合を合わすのが難しいです。エンコーダを日本電産ネミコンのものに変え、精度が上がり、設定が細かく変えれるようになった。直線の速度制御、フリー走行、カーブでの外側デューティのデイップスイッチによる変更、坂道の下りでのブレーキなどが全国大会以降に付け加わりました。何とか完走していますが、レーンチェンジが安定せず早くするのに苦労しています。昨年よりは速くはなっていますが、全国のレベルの高さを改めて感じました。
あざ〜すレーシング
今井 豊
まあめいど2号
GP製 1000mAhニッカドバッテリー8本直列
指定モータ フロント2本 リア4本 60:8
42mm
maxon RE16+GP16A 38:1
キット標準センサ(デジタル) 8個
1070g
4輪独立制御・横置きステアリングモータ・スタビライザー&ショックアブソーバ
今年新たに4輪独立制御に取り組みましたが、なかなかパラメーターのセッティングが決まらずまともに走行さえできませんでした。
日本工業大学 マイクロコンピュータ研究部
佐藤 宏憲
Black Wing
GP2300ニッケル水素電池8本
指定モータを6個、フロント2モータ、リア4モータ 7.5:1
41mm 幅50mm(フロント、リア共通)
maxon製RE-21+ギヤヘッドを使用 47.5:1
アナログ ライントレース用に2個、デジタル 3個
約1250g
・ガタ、不規則な動きをする部分の排除
→自分の思ったとおりのプログラムが組みやすくなる。安定性が上がる。
・センサーバーにカーボンパイプを利用
→プラ板のようにしなり、反りがないために毎回同じセッティングにでき制御が簡単になる。クラッシュしても先端のプラ板のみ交換すればよい設計になっています。
・ロータリーエンコーダの自作
→使い終わった指定モータのハウジングを使って内部に基盤、エンコーダホイール等、全て中に入れています。ケースに入れることでショック、外乱から守り信頼性を上げている。ケーブルをCPUに繋げば市販のエンコーダのように使えるようになっています。
強度を保つためにしっかりと作ったが、モータ6個に対して1200gが負担になってしまった。重さを生かしてグリップは稼げたが、加速が遅く、クランクもキレが無くなってしまった。なるべくスピードを変化させないようなプログラムにしてあります。ほぼ全ての処理を時間で見るのではなくエンコーダを使って進んだ距離でプログラムをコントロールしている。スピードを変えても安定して走ることができる工夫をしました。部品(ギヤボックス)などは単品で精度を出し、部内で共通のものを使っている。これによって設計の制限はあるが万が一の時に部内で助け合うことができる構造になっています。
湘南工科大学 ロボット技術研究会
井上 貴夫
隼07ver.
駆動用・CPU電源共通でニッカド8本 9.6V
maxon製 RE-max21(221010)×4個 60:8
39mm
maxon製REmax16(118682)、ギアヘッド110322+25:60
走行・マークライン検出用:アナログGP2S40 2つを1つのアナログセンサとして用いて2つ、キットに入っているデジタルセンサを3つ、ゲートセンサ:アナログ GP2D12、ポテンションメータ(角度センサ) RDC506
センサの種類(アナログ、デジタル)と個数
1033g
車検の際にバッテリーチェックが行いやすいようにシャーシの一部に透明なPP板を採用し、バッテリーのチェックを容易にした(昨年の南関東12月の際にバッテリーをはずすときに焦ってコードを切ってしまった(バッテリーのグランド線)ためそれの反省を生かした)。クランクを曲がりやすいようにセンサアームの長さを調整した。ゲートセンサは、アナログ値で読み取り、初期値との変化量でゲートの開放の判断をさせている
今年より、ステアリングを、ラジコンサーボを用いた方式から、モータに変えた。その際、両軸受けを部分的に採用したために、なかなか加工が成功しなかった。
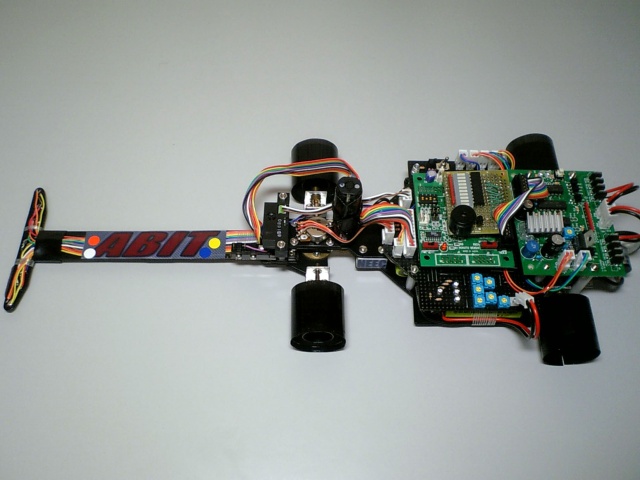
日本工学院テクノロジーカレッジ
飯塚 剛
ABIT
ニッカド電池 8本
maxon製 RE 16 118685、ギヤヘッド 4.4:1 110321
33mm
maxon製 RE 16 118685、ギアヘッド 19:1 110322+80:40
アナログ シャープ製 GP2S40J0000F×2、デジタル 同一センサ×5
810g
駆動モータやバッテリーを車体の中心部にできる限りまとめて配置し、重心を安定させました。クロスライン、ハーフラインの検出方法を工夫して、多少角度がついて進入しても正確に検出できるようにしました。走行用プログラムだけでステアリングのセンター調整やエンコーダの動作チェック等ができるようにプログラムを組みました。
当初、坂道検出スイッチをエンコーダ部分に搭載していましたが、上り部分で車体が跳ね上がり、正確に検出できなかったため急遽センサーバー部分に変更しなければならなかったことが大変でした。レーンチェンジで車体がバタついてしまい、安定して走行することができていないので、これから調整していきたいです。
株式会社三洋メディコムソフトウェア
梅田 裕久
さめす太郎3号
ニカド GP1000mAh 8本
指定モータ4個 8:70
44mm
KO-PROPO PS-2174FET
センサ基板Ver.、日本電産ネミコン製ロータリーエンコーダ
804g
ラジコンサーボを使った擬似アッカーマンリンク構造を採用。シャーシは軽さとしなやかさを追求して低価格な発泡塩ビを使用。EEP-ROMを使用して走行データのログを記録しています。
ラジコンサーボを使ってアッカーマンリンクを実現する設計のアイデアと、慣れていないアルミの削りだし作業などを行うことが苦労しました。またプラ段を使用した手作りコースを4畳スペースの畳みの上に設置し、その上で走行させているため、小さく悪路な路面状況で走るマシンのプログラムミングとなってしまい。土曜日の試走時に急遽プログラム修正が必要となった点がとても苦労しました。
あざ〜すレーシング
村田 吉孝
UNIUNI
GP製 1000mAhニッカドバッテリー8本直列
指定モータ フロント2本 リア4本 60:8
42mm
maxon製 RE16+GP16A 38:1
キット標準センサ(デジタル) 8個
1050g
横置きステアリングモータ・オリジナルセンサー基盤・スタビライザー&ショックアブソーバ
昨年全国大会に出場した状態を崩さないようにしつつ、プログラムやセンサーの間隔などによって調整を行いましたが、思うようにタイム短縮ができません。
長野県駒ヶ根工業高等学校
福澤 淳也
Atlas
8本
指定モータ 4輪各1個計4個使用 62:12
34mm
maxon製 RE16 66.5:1
走行検出:アナログセンサ2個(GP2S40) デジタルセンサ5個(TLN119+S7136)、坂道検出:デジタルセンサ1個(TLN119+S7136)、エンコーダ ロータリーエンコーダセット(日立インターメディックス)
900g
自作基板のドライバ回路で何度かFETを焼いてしまい、修理するのが大変だった
湘南工科大学 ロボット技術研究会
白戸 裕介
KARASUMA
SANYO Cadnica 8本
maxon RE-max17 9:1
約55mm
maxon RE-max17 40:1
アナログ4個、デジタル5個
870g
車体構成部分が、80%カーボン・センサがアナログとデジタル双方使用している事。
ステアリングギヤボックスがカーボン製な為、加工精度が出しにくかった。また、バックラッシを抑えるのが非常に難しかった。今回の大会用に、ランサーで使用していたセンサを参考にし、自分専用のセンサを設計するのが難しかった。エンコーダの扱い方がいまいち解らず、エンコーダ距離カウントでの距離制御を大会寸前まで苦労をした。また、基本プログラムを修正するのにかなりの時間を要した。
写真
所属
お名前
カーネーム
電池の本数
駆動モータのメーカー、型式、個数、ギヤ比
タイヤの直径
ステアリングのサーボ(またはモータ)の型式、ギヤ比
センサの種類(アナログ、デジタル)と個数
重量
特徴
苦労した点
Copyright (C) ジャパンマイコンカーラリー実行委員会 All Rights Reserved.