【一般の部 上位入賞者】
優勝
 |
| 香川県立三豊工業高等学校教諭 勘原利幸さん「拳禅一如」 |
| 内 容 |
詳 細 |
| 全 長 |
550mm |
| 全 幅 |
290mm(カウル含む) |
| ホイールベース |
165mm |
| 重 量 |
1160g |
| ラインセンサ |
変調型フォトセンサ 浜松フォトニクスS7136
7個 |
| 駆動モータ |
マクソンモータ3.2W 4.5V |
| 駆動方式 |
4輪駆動 |
| 駆動系電圧 |
電池7本8.4V |
| ギヤ比 |
4.4:1のギヤヘッドモータ |
| サーボ |
マクソンモ−タを使用ギヤヘッドで19:1さらにギヤで50:20に減速 |
| サーボ電圧 |
電池7本8.4V |
| タイヤ、ホイール |
旋盤による削り出し自作 φ42mmスポンジタイヤの上からシリコンシートを貼っている |
| 特 徴 |
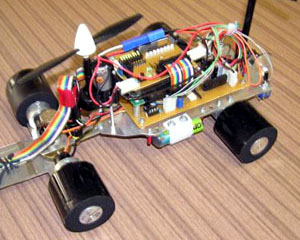
四国地区大会のマシンにプロペラを追加し、上方に風を吹き上げることでタイヤのグリップを増した。カウルを工夫して風の抵抗を受けにくくし、翼により走行安定性を増した。 |
| 苦労した点 |
駆動モータの個体差が走行性能に微妙に影響するので、バランスのいいモータ選びと配置に苦労した。またプロペラをつけることによる重量アップのマイナス要素をいかにしてプラスに働かせるか悩んだ。 |
| 感 想 |
初めての全国大会で優勝することができ驚いている。校内ランキングは3位であったが、全国大会ではモータの調子がよかったのか安定した走りを見せてくれた。高校生の部と一般の部のタイムが縮まってきているので、来年もまた新しいマシンで参加して意地を見せたい。高校生の部の優勝者は、私が3年間担任した生徒で喜びもひとしおだった。 |
|
 |
 文書用のクリアファイルとペッドボトルを加工してカウルを作成。後方のT字の出っ張りは手で持つ為の工夫。 文書用のクリアファイルとペッドボトルを加工してカウルを作成。後方のT字の出っ張りは手で持つ為の工夫。 |
|
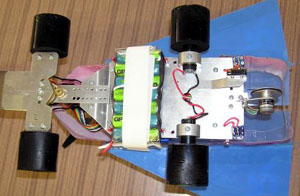
 ホイールの中にモータを入れるようにして、幅が広くならないようにしている。 ホイールの中にモータを入れるようにして、幅が広くならないようにしている。 |
|
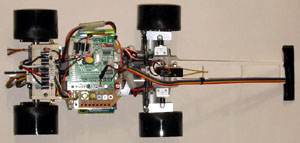
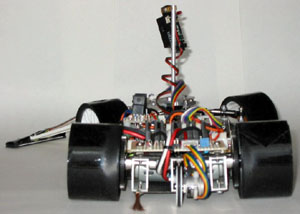
 裏から見たところ。ニカド電池を7本パック化して接触抵抗を減らし、電池ボックスが無い分軽量になる。後方にロータリエンコーダとリミットスイッチを搭載。上り坂終了直前にスピードを落として、ジャンプするのを防いでいる。 裏から見たところ。ニカド電池を7本パック化して接触抵抗を減らし、電池ボックスが無い分軽量になる。後方にロータリエンコーダとリミットスイッチを搭載。上り坂終了直前にスピードを落として、ジャンプするのを防いでいる。 |
ベスト8
|
| 日産自動車(株) 河野純也さん「FRAGILE003」 |
| 内 容 |
詳 細 |
| 全 長 |
405mm |
| 全 幅 |
170mm |
| ホイールベース |
165mm |
| 重 量 |
765g |
| ラインセンサ |
アナログ×2 デジタル×3 前方検出センサ×1 |
| 駆動モータ |
高校の部の指定モータ |
| 駆動方式 |
4輪駆動 |
| 駆動系電圧 |
電池8本9.6V |
| ギヤ比 |
約8.2:1 |
| サーボ |
近藤科学 型式:PSD-2123FET
を直接制御 |
| サーボ電圧 |
電池8本9.6V |
| タイヤ、ホイール |
ラジコン用ホイールにスポンジとシリコンシートを巻いている
直径:58mm |
| 特 徴 |
●本体
4モータ4WD+リンク式のステアリング機構を採用している。軽量化のためにメインシャシにカーボンを使い、ビス類はポリカ、アルミ、チタンを使用。駆動&制動効率アップのために、モータドライバはFETによるHブリッジを自作している。低重心となるように重量物を低く配置し、車高をギリギリまで下げている。
●プログラム
アセンブリ言語にて記述している。4bitのDIP-SWと3個のHEXロータリSWを装備し、走行速度等のパラメータを設定している。 |
| 苦労した点 |
リンク式ステアリング機構と4WDを組み合わせて車幅を170mmにするために、前輪ギヤボックスの設計に時間がかかった。また、クランクやカーブへの進入時に逆転ブレーキをかけるが、ギヤ欠けを多発してしまい、大会直前までその対策に追われた。
ラインセンサは自重で路面に接するタイプで開発していたが、坂道や段差でセンサがはねてコースアウトすることがあり、路面に押し付けるように対策した。
ソフトの方では、アナログセンサによるライントレースが安定せず1ヶ月費やしたが、結局クランクからの立ち上がりが安定せず、クランクの速度をあまり上げられなかった。
また、逆転ブレーキをかけた際にリセットする事が多くあり、コンデンサ類では対策しきれず最終的にソフトで対策を行った。
全国大会前の関東地区はとても乾燥していて、静電気によると思われる誤作動が多発し、静電気対策に苦労した。そのおかげか、北海道では静電気によると思われる誤作動は一度もなかった。 |
| 感 想 |
雪のため前日の下見などは大変だったが、大会本番でベスト8に入ることができてうれしい。次回は地区大会までに十分チューニングして、全大会で優勝できるロボットに仕上げたい。 |
|
|
 ホイールベースと、前輪からセンサまでの距離が同じになっている。 ホイールベースと、前輪からセンサまでの距離が同じになっている。 |
|
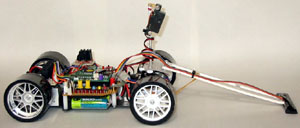 塔のように立っているのは、ラインセンサよりもっと前を検出するためのセンサ。ニカド電池8本を半田付けして固定している。 塔のように立っているのは、ラインセンサよりもっと前を検出するためのセンサ。ニカド電池8本を半田付けして固定している。 |
|
 タイヤにキャンパー角を内側につけている。通常走行はタイヤの内側しか接地しないが、高速カーブでは全面が接地して安定性が増す。 タイヤにキャンパー角を内側につけている。通常走行はタイヤの内側しか接地しないが、高速カーブでは全面が接地して安定性が増す。 |
