【一般の部 上位入賞者】
優勝
 |
| 香川県立三豊工業高等学校 中尾伊知郎さん「ICHIRO」 |
| 内 容 |
詳 細 |
| 全 長 |
540mm |
| 全 幅 |
190mm |
| ホイールベース |
160mm |
| 重 量 |
1010g |
| ラインセンサ |
変調型フォトセンサ 浜松フォトニクスS7136 7個 |
| 駆動モータ |
マクソンモータ3.2W 4.5V×4本 |
| 駆動方式 |
4輪駆動 |
| 駆動系電圧 |
NiCd電池8本9.6V |
| ギヤ比 |
4.4:1のギヤヘッドモータ |
| サーボ |
マクソンモ−タを使用
ギヤヘッドで19:1さらにギヤで50:20に減速 |
| サーボ電圧 |
駆動系電源と同じ |
| タイヤ、ホイール |
ホイール(φ25ジュラルミン棒より削り出し)
タイヤ(30mm厚スポンジシートをカット、穴をあけ、ホイールに貼付け後、外径φ40に削る。表面にシリコンシートを貼付け) |
| 特 徴 |
ホイールの幅を小さく、側面に穴あけをするなどし、タイヤ・ホイール(回転部)の軽量化を図っている。低重心、前後タイヤへの重量バランスを考えた部品配置をしている。 |
| 苦労した点 |
タイヤの幅、部品配置などトータル的にバランスのとれたマシンを作ることと、マシンにあった設定を見つけるのに苦労した。 |
| 感 想 |
初参加でありながら全国大会で優勝することができ、びっくりしています。色々な面で協力してくれた三豊工業高校全員の勝利だと思っています。また、コースアウトしても、相手もコースアウトして再レースになるなど、”運”も味方してくれた大会だったと思っています。来年は、マシンの性能をアップさせ、連覇を狙いたいと思います。 |
|
 |
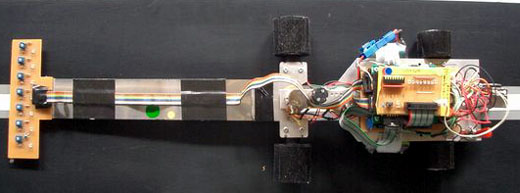
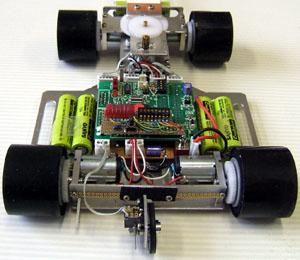
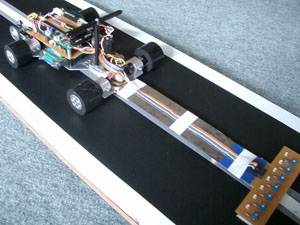 最近のマイコンカーはタイヤの幅が広くなってきているが、これはあまり幅広くない。重いが非常にしっかりした作り。T字の出っ張りは手で持つ為の工夫。 最近のマイコンカーはタイヤの幅が広くなってきているが、これはあまり幅広くない。重いが非常にしっかりした作り。T字の出っ張りは手で持つ為の工夫。 |
|
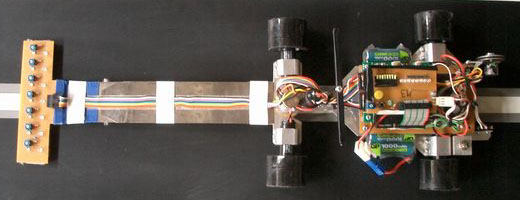
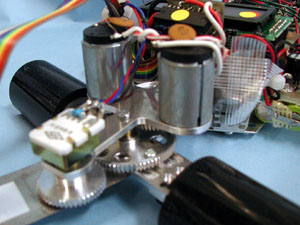
モータの中にホイールを埋め込むように取り付け、トレッドを短くしている。 |
|
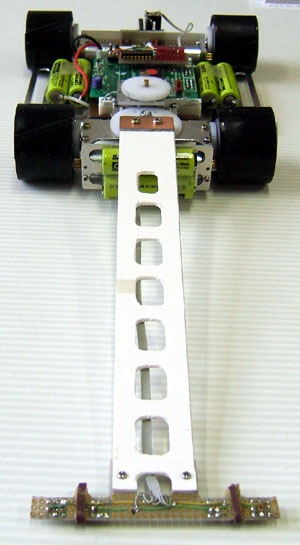
ニカド電池を8本パック化して接触抵抗を減らし、電池ボックスが無い分軽量になる。後方にロータリエンコーダとリミットスイッチを搭載。上り坂終了直前にスピードを落として、ジャンプするのを防いでいる。 |
準優勝
|
| 香川県立三豊工業高等学校 大美周平さん「帆立、いくら、旨い蟹」 |
| 内 容 |
詳 細 |
| 全 長 |
560mm |
| 全 幅 |
175mm |
| ホイールベース |
165mm |
| 重 量 |
990g |
| ラインセンサ |
変調型フォトセンサ 浜松フォトニクスS7136 7個 |
| 駆動モータ |
マクソンモータ3.2W 4.5V×4本 |
| 駆動方式 |
4輪駆動 |
| 駆動系電圧 |
NiCd電池8本9.6V |
| ギヤ比 |
4.4:1のギヤヘッドモータ |
| サーボ |
マクソンモ−タを使用
ギヤヘッドで19:1さらにギヤで50:20に減速 |
| サーボ電圧 |
駆動系電源と同じ |
| タイヤ、ホイール |
・前輪
ホイール(φ20×40mmジュラルミン棒より削り出し)
タイヤ(40mm厚スポンジシートをカット、穴をあけ、ホイールに貼付け後、外径φ40に削る。表面にシリコンシートを貼付け)
・後輪
ホイール(φ25×30mmジュラルミン棒より削り出し)
タイヤ(30mm厚スポンジシートをカット、穴をあけ、ホイールに貼付け後、外径φ38に削る。表面にシリコンシートを貼付け) |
| 特 徴 |
前輪の取り付け幅が後輪にくらべ20mm狭くなっている。前輪を優先的に考え、後輪は補助駆動的な扱いにした。 |
| 苦労した点 |
ホイルベースの調整やタイヤ取り付け幅の調整を凄くした。その結果が今の形となった。マシーンのセットアップによりかなり走りに差が出るので、今の形にするまでかなりデータ採りをした。 |
| 感 想 |
速いマシーンが他にも沢山あったが運も見方してくれ、なんとか悲願の3位以内に入れた。落ちないことを目標に調整したのが良かったのかな?まだまだ改良の余地はあると思うので、是非来年も全国大会に出たいと思う。ドラッグカーがあればそちらにも出場したいです。大会ではお世話になりました。有り難う御座いました。 |
|
|
 センサの高さ調整には柔らかい素材を使用している。固いとコースの継ぎ目ではねてしまうことがあるが、柔らかいので段差を吸収して跳ねない。 センサの高さ調整には柔らかい素材を使用している。固いとコースの継ぎ目ではねてしまうことがあるが、柔らかいので段差を吸収して跳ねない。 |
|
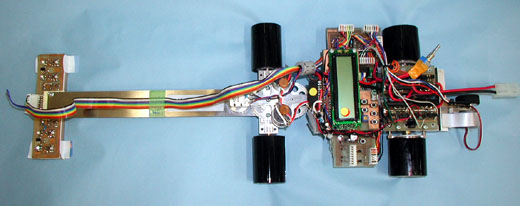
上から見たところ。前タイヤが後ろタイヤより幅広い。タイヤの直径はどちらもほとんど変わらない。 |
|

本体の配置は、上から基板(スイッチ、CPUボード、メインボード)、シャーシ(アルミ)、電池の順番。優勝した中尾さんとは配置がだいぶ異なる。 |
3位
|
| TRC 中村雄一さん「SYNR−SWK」 |
| 内 容 |
詳 細 |
| 全 長 |
520mm |
| 全 幅 |
175mm |
| ホイールベース |
150mm |
| 重 量 |
934g |
| ラインセンサ |
中心2個 アナログセンサ
外側2個ずつ計4個 キットのデジタルセンサ |
| 駆動モータ |
高校生用指定モータ |
| 駆動方式 |
後輪駆動 1輪2個 計4個 |
| 駆動系電圧 |
9.6V |
| ギヤ比 |
8:70 |
| サーボ |
自作サーボ ギヤ比1:40 |
| サーボ電圧 |
9.6V |
| タイヤ、ホイール |
スポンジグリップを加工(ホームセンターにて購入)
前輪径:36mm 後輪:40mm |
| 特 徴 |
低重心を心掛けました。自作サーボのトルクを上げるためモータをダブルにしました。 |
| 苦労した点 |
各パーツの配置やタイヤ径などの選定に試行錯誤しました。 |
| 苦労した点 |
タイム的には、このような好成績を残せるハズはなかったのですが、幸運が重なり、予想以上の結果となりました。 |
|
|

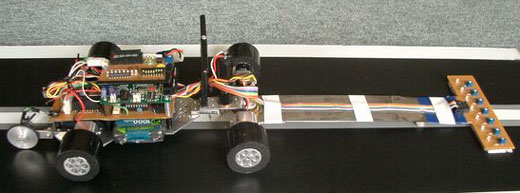
センサはアナログセンサとデジタルセンサの混在。通常トレースはアナログセンサを使用。クロスライン、クランクの検出などはデジタルセンサを使用。ホイールは塩ビのパイプを使用。 |
|
液晶を付けて、各種状態をモニタしている。パラメータ設定用としても使用。パラメータは、10弱の項目の設定が出来る優れもの。タイヤは前輪が幅広い。後輪は直径が大きい。 |
|
 ステアリング部分。全て自作。トルクをあげるためモータを2個並列に接続。一番前方に見える白い部品はボリューム。ステアリングの切れ角度によりボリュームの抵抗が変わり、電圧が変化。H8のA/D機能で現在の角度が分かる。 ステアリング部分。全て自作。トルクをあげるためモータを2個並列に接続。一番前方に見える白い部品はボリューム。ステアリングの切れ角度によりボリュームの抵抗が変わり、電圧が変化。H8のA/D機能で現在の角度が分かる。 |
予選タイム 第3位
|
| 防衛大学校 情報工学科 滝田好宏さん「i−Vehicle」 |
| 内 容 |
詳 細 |
| 全 長 |
415mm |
| 全 幅 |
170mm |
| ホイールベース |
155mm |
| 重 量 |
578g |
| ラインセンサ |
アナログ方式 GP2S40× 4個 |
| 駆動モータ |
maxon社製 REmax17 5V |
| 駆動方式 |
4輪駆動 1輪1個 |
| 駆動系電圧 |
7.2V ニッカド電池×6本 |
| ギヤ比 |
5:1 |
| サーボ |
maxon社製 REmax17 5V ギヤ比
45.9:1 |
| サーボ電圧 |
7.2V ニッカド電池×6本 |
| タイヤ、ホイール |
自作 直径42mm |
| 特 徴 |
・タイヤの柔軟化(ホイール径を小さく、スポンジは柔らい素材)
・重量配分は前輪6:後輪4に設定
・低重心
・ロール軸周りの慣性モーメントを大きくするよう配置
・SSM操舵比率1:1 |
| 苦労した点 |
・静電気と思われる誤動作対策
・遅く進入したクランクでの再引き込み時の不安定対策 |
| 苦労した点 |
問題を解決して走れるようになるとすぐ限界がくる。
どんどん深みに入っていくようです。 |
|
|
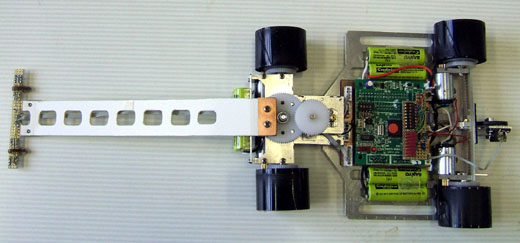
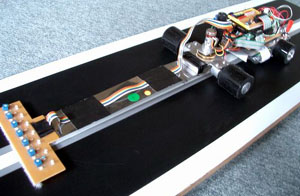
電池は6本。2本はフロント部に取り付け重量配分に気を付けている。シャーシにスリットをもうけて軽量化するとともに、その部分に電池を取り付け低重心化もかねている。上位は重量級を占めるが、600g弱と超軽量。 |
|
 ロータリエンコーダを取り付け、距離と現在速度を検出。 ロータリエンコーダを取り付け、距離と現在速度を検出。
CPUボード上には確認用のLEDとパラメータ設定用のディップスイッチを増設している。 |
|
 ステアリング部分。センサ基板は非常に小型軽量。フラットケーブルも、キットとは違う細い線を使用。細部にわたり軽量化を考えている。フロントタイヤからセンサまでの距離は230mm。 ステアリング部分。センサ基板は非常に小型軽量。フラットケーブルも、キットとは違う細い線を使用。細部にわたり軽量化を考えている。フロントタイヤからセンサまでの距離は230mm。 |
