【特別レース 上位入賞者】
ニューレギュレーションレース 優勝
 |
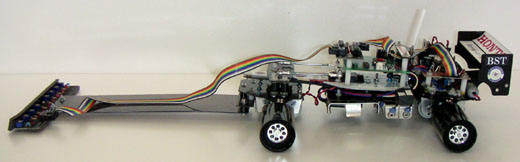
| 岐阜県立岐阜工業高等学校電子研究部 田中順也くん「テスターBST」 |
| 内 容 |
詳 細 |
| 全 長 |
530mm |
| 全 幅 |
230mm |
| ホイールベース |
180mm |
| 重 量 |
790g(電池なし) |
| ラインセンサ |
デジタルセンサ8個
基板は、キットを黒く塗って使用 |
| 駆動モータ |
高校生指定モータ 8個 |
| 駆動方式 |
4輪駆動 タイヤ一つあたり2個 |
| 駆動系電圧 |
電池8本 直列9.6V |
| ギヤ比 |
50:8 |
| サーボ |
KO PROPO PDS−2123FET |
| サーボ電圧 |
電源を可変三端子レギュレータによって降圧7.2V |
| タイヤ、ホイール |
ホイルは電動カー用。スポンジは、ホームセンタで買った水道管用のスポンジカバーを切って使用。 |
| 特 徴 |
F1が好きなので、車の形を近づけるように設計。車体はカーボン製、ウイングはエンジンカー用。ステッカーは、自作。シャーシも塗装しました。サーボは、重心を低くするために取り付け位置を工夫。ステアリングアームにはピローを使っています。プログラムは、公開されたニューレギュレーション対応プログラムを車の速度に合わせて変更。ディップスイッチによって細かい速度調整ができるようにしてあります。また、T字路、Y字路、車線変更の部分でのチャタリング防止のためにプログラムを工夫しました。 |
| 苦労した点 |
駆動モータのギヤと車軸のギヤの噛み合わせが、難しく加工が大変だった。T字路、Y字路、車線変更のプログラムの調整に手間取り、大会ぎりぎりまでかかってしまった。特にT字、Y字が難しく感じました。 |
| 感 想 |
東海地区大会では、全国大会まで、あと一歩だったので、とても悔しい思いをしました。地区大会終了後に先生や先輩と話し合ってニューレギュレーションレースに出場することを決めました。出場するからには、上位入賞を目標にマシンを製作し、マシンテストに励みました。どんなコースでも完走できるように、お正月も休まずマシンを調整して全国大会へ向かいました。予選では、自分のマシンが完走すればいいと思って走らせました。T字、Y字、車線変更と順調にクリアし完走!「ヤッタ!!」と思いました。予選が終了し、自分の前後に完走するマシンがなく、その日に優勝が決まりました。まさか、こんなことになるなんて思っていなかったので、本当に嬉しかったです。この優勝は、先生、先輩達や後輩達のおかげで出来たのだと思います。来年度は、全国大会高校生の部で優勝できるように頑張っていきたいです。 |
|
 |
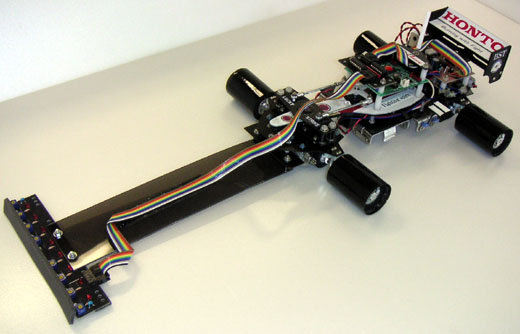
F1に似せて製作。サーボは重心を低くするため、取り付け位置に工夫が凝らされている。 |
|
ホイールはラジコン用を流用。それにホームセンタで買ったスポンジを取り付け、最後にシリコンシートを貼っている。 |
|
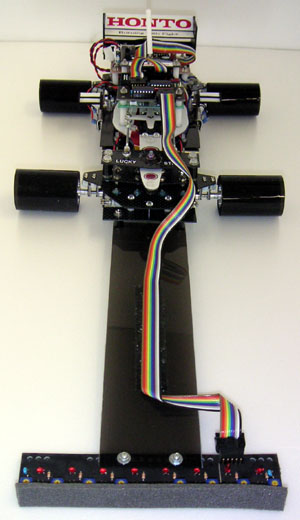 センサ基板はキットと同じ。外乱を防ぐのと色の統一するために黒く基板を塗っている。 センサ基板はキットと同じ。外乱を防ぐのと色の統一するために黒く基板を塗っている。 |
ドラッグカーレース 優勝
|
| 防衛大学校 情報工学科 滝田好宏さん「i−Vehicle」 |
| 内 容 |
詳 細 |
| 全 長 |
300mm |
| 全 幅 |
160mm |
| ホイールベース |
205mm |
| 重 量 |
592g |
| ラインセンサ |
KU381-80 ×2個 |
| 駆動モータ |
指定モータ1個
(規則で決まっています) |
| 駆動方式 |
後輪駆動 左右タイヤは直結 |
| 駆動系電圧 |
ニカド電池8本 9.6V |
| ギヤ比 |
7.2:1 |
| サーボ |
maxon社製 REmax17 5V ギヤ比36.9:1 |
| サーボ電圧 |
ニカド電池8本 9.6V |
| タイヤ、ホイール |
自作 直径42mm |
| 特 徴 |
・コース両脇の白線を追従している
・センサバーを障害物センサ(スタンレーKU381-80)で置き換え
・スタートバーもKU381-80で感知
・ロングホイールベース
・前輪メカブレーキ
・SSM操舵比率1:1 |
| 苦労した点 |
・走行場所の確保
・安定するサンプリング周期の設定 |
| 感 想 |
マイコンカーとは異なるおもしろさがある。人間と競争できると面白い。 |
|
|
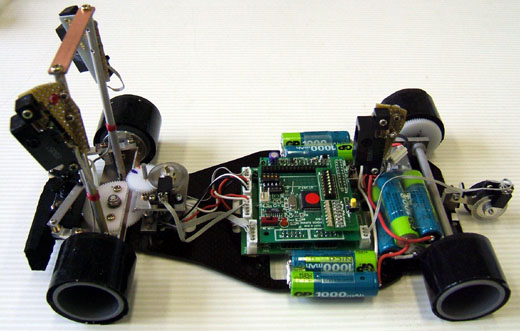
ドラッグカーは全長300mm以内という、マイコンカーにはない規定があるため、ほとんどの選手が小さくマイコンカーを作ったような感じだった。が、滝田さんのドラッグカーはKU381-80という80cm先まで見られるセンサを使って車体を300mmいっぱいいっぱいまで使っている。写真左の塔のように立っているセンサがそれ。ホイールベースが長いため直進性が格段によい。後方にも同様のセンサが立っているが、これはスタートバー開を検出するために取り付けられている。 |
|
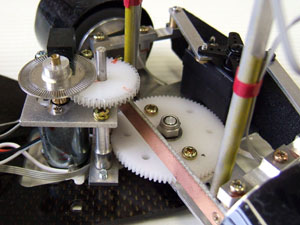 ステアリング機構も自作している。モータとギヤを組み合わせている。バックラッシュ(ギヤとギヤの隙間)を極力減らし、遊びを無くしている。モータ上の円盤は、エンコーダ用。現在の切れ角をこの機構で検出している。 ステアリング機構も自作している。モータとギヤを組み合わせている。バックラッシュ(ギヤとギヤの隙間)を極力減らし、遊びを無くしている。モータ上の円盤は、エンコーダ用。現在の切れ角をこの機構で検出している。 |
|
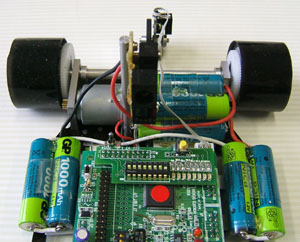 電池は中央部の左右に4個、後部に電池と対象になる位置に4個取り付けている。モータと電池をバランス良く配置して、左右の重量をほぼ均等にしている。 電池は中央部の左右に4個、後部に電池と対象になる位置に4個取り付けている。モータと電池をバランス良く配置して、左右の重量をほぼ均等にしている。 |
|
 25mを6秒弱というとてつもないスピードにも関わらず、ほぼ一瞬で止まっていたのを皆さん、覚えているだろうか。何と、メカブレーキ機構が搭載されていた。 25mを6秒弱というとてつもないスピードにも関わらず、ほぼ一瞬で止まっていたのを皆さん、覚えているだろうか。何と、メカブレーキ機構が搭載されていた。 |
|
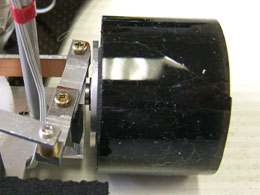 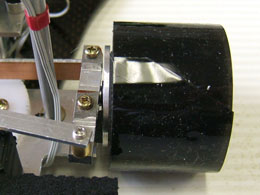
左写真がブレーキしていない、右がブレーキしている状態。ホイールにゴムを押しつけてブレーキしている。まるで本物の車のディスクブレーキの様。
マイクロサーボを使って、前輪ブレーキ機構を実現。マイコンカーでも使用できないか聞いたところ、マイクロサーボの反応が遅く、通常のマイコンカーでは難しいのではとのこと。 |
