【一般の部 上位入賞者】
優勝
 |
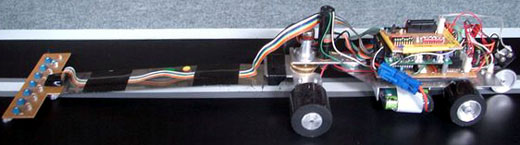
| 香川県立三豊工業高等学校 大美周平さん「ほっけ、鮭も旨い蟹」 |
| 内 容 |
詳 細 |
| 全 長 |
560mm |
| 全 幅 |
175mm |
| ホイールベース |
165mm |
| 重 量 |
990g |
| ラインセンサ |
変調型フォトセンサ 浜松フォトニクスS7136 7個 |
| 駆動モータ |
マクソンモータ3.2W 4.5V×4本 |
| 駆動方式 |
4輪駆動 |
| 駆動系電圧 |
ニッカド電池 8本 |
| ギヤ比 |
4.4:1のギヤヘッドモータ |
| サーボ |
マクソンモ−タで自作
ギヤヘッドで19:1さらにギヤで50:20に減速 |
| サーボ電圧 |
駆動系電源と同じ |
| タイヤ、ホイール |
●前輪
ホイール(φ20×30mmジュラルミン棒より削り出し) タイヤ(40mm厚スポンジシートをカット、穴をあけ、ホイールに貼付け後、外径φ40に削る。表面にシリコンシートを貼付け)
●後輪
ホイール(φ25×30mmジュラルミン棒より削り出し) タイヤ(30mm厚スポンジシートをカット、穴をあけ、ホイールに貼付け後、外径φ38に削る。表面にシリコンシートを貼付け) |
| 特 徴 |
タイヤ幅を30mmにし、特に前輪のハンドル性能をあげた。 |
| 苦労した点 |
直線でのスピードは昨年と変わらなかったが、コーナー重視でコーナーリングをかなり時間を掛けて調整した。 |
| 感 想 |
昨年のマシーンを使用し熟成した形での出場となった。ある程度の状況は把握していたつもりが地区予選で一度、予想外の所でコースアウトため、全国大会でもコースの材質変更に対する心配はあった。決勝トーナメントでは能力の高いマシーンも多く、あくまでも運良く勝ち上がれただけ、生徒や同僚と共に頑張った結果が最高の場面で出た。回りの理解や協力があってできたことなので感謝しています。全体的にタイムが縮まってきたので来年はもっと激戦になると思うので辛いのと同時に楽しみです。 |
|
 |

 |
準優勝
|
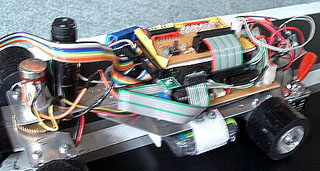
| 防衛大学校 情報工学科 榮井 弓子さん「MAGNA」 |
| 内 容 |
詳 細 |
| 全 長 |
485mm |
| 全 幅 |
168mm |
| ホイールベース |
157mm |
| 重 量 |
605g |
| ラインセンサ |
アナログセンサ4個 |
| 駆動モータ |
maxon REmax17 |
| 駆動方式 |
4輪駆動 |
| 駆動系電圧 |
ニッカド電池6本 |
| ギヤ比 |
5:1 |
| サーボ |
maxon REmax17で自作 44.8:1 |
| サーボ電圧 |
駆動系電源と同じ |
| タイヤ、ホイール |
直径42mm 幅30mm |
| 特 徴 |
4輪独立駆動制御、低重心、センサアームの構造、高速追従・応答 |
| 苦労した点 |
直角コーナ時の安定化 |
| 感 想 |
大会当日にマシンがベストな状態で走行するように、それまでの準備や競技直前の調整がいかに難しく、大切であるかを学びました。
また、競技においては綿密な計画が必要であり、アドバイスを受けたり、経験を重ねることが重要であると痛感しました。
JMCR2006全国大会で準優勝という素晴らしい成績を残せることができ、滝田教授のご指導に感謝し、これからも頑張っていきたいと思います。 |
|
|


 |
3位及びベストタイム賞
|
| 九州産業高校OB 綿貫 祐介さん「疾風」 |
| 内 容 |
詳 細 |
| 全 長 |
505mm(エンコーダ含む) |
| 全 幅 |
170mm |
| ホイールベース |
195mm |
| 重 量 |
984g |
| ラインセンサ |
アナログ×2個、デジタル(キットと同等)×4個 |
| 駆動モータ |
maxon製 |
| 駆動方式 |
後輪駆動 1輪1モータ |
| 駆動系電圧 |
9.6V |
| ギヤ比 |
7:1 |
| サーボ |
maxon製モータ自作 66.5:1 |
| サーボ電圧 |
9.6V |
| タイヤ、ホイール |
直径36mm |
| 特 徴 |
マシンをオーバーステアリングの設計、プログラムをアンダーステアリングにすることで、カーブでの無駄な減速を抑えることが可能になった。 |
| 苦労した点 |
原因不明のリセットに悩まされて、大会一週間もない時期に新しく作り直したこと、重量配分に苦労しました。 |
| 感 想 |
初の決勝トーナメント進出で3位になり、後輩も結果が残せたのでお世話になった関係者の方に感謝したいです。来年は、新レギュレーションになる可能性もあるので、アドバイスなどよろしくお願いします。今年以上に万全の体制で後輩共に上位入賞を狙って行きたいです。 |
|
|


 |
