| ● |
本ページの内容は、上位入賞者の皆さんへアンケートを送り、ご回答いただいた内容を掲載しています。お忙しい中ご回答いただきました顧問の先生、選手の方々のご厚意に感謝します。 |
| ● |
学校や本人へ直接問い合わせることはしないようお願いします。 |
|
【高校生 上位入賞者】
|
高校生の部 優勝
 |
| 香川県立三豊工業高等学校 池田 竜「Line Spear」 |
| 内 容 |
詳 細 |
| 長さ関係 |
全長:570mm 全幅:170mm ホイールベース:170mm |
| 重量 |
1035g |
| 電池 |
ニッカド電池8本 |
| 駆動モータ |
前輪:1輪2個 後輪:1輪2個 合計8個
ギヤ比:56:8 加えている電圧:9.6V |
| タイヤ、ホイール |
旋盤による削り出し自作 φ42mm
スポンジタイヤの上からシリコンシートを貼っている |
| サーボ |
maxonモ−タを使用 ギヤヘッドで19:1さらにギヤで50:20に減速 |
コース検出
センサ |
変調型フォトセンサ 浜松フォトニクスS7136 7個 |
その他の
センサ |
エンコーダ、坂道検出スイッチ |
| 特 徴 |
低重心で重量をできるだけ軽量化し、高速でのカーブやレーンチェンジ突入時の安定性を強化した。 |
| 苦労した点 |
車体のバランスやハンドルの切り角の調整など細かい部分の調整に時間を要しました。コースアウトの原因をビデオカメラの映像で追求するなどして、全国大会直前まで走りの安定性を詰めました。 |
| 感想 |
僕は、昨年に続き2度目の出場となりました。今年は、昨年の予選落ちの悔しさをバネに何としても全国大会の決勝に残るという、高い目標を持ってマシンの製作に取り組みました。学校のコースのレイアウトを直線を減らしたものに変えて、難しいコースでも落ちないような走りを追求しました。ところが全国大会前日の試走会では一度も完走することができず、対策はしたものの完走できる確証のないまま予選レースに臨みました。とにかく予選通過だけを考えて走らせ、決勝トーナメントでは「1つでも勝ち上がり上位へ!」という気持ちでレースに挑みました。その結果、願いが叶って全国大会優勝という結果を出すことができました。この強い気持ちを持てたのはいっしょに活動してきた仲間たちとサポートをしてくれた先生方のおかげだと思います。今回の経験を後輩に伝え、来年度も優勝を目指してがんばってもらいたいと思います。 |
|
 |
※画像はクリックすると拡大表示します。
|
高校生の部 準優勝
|
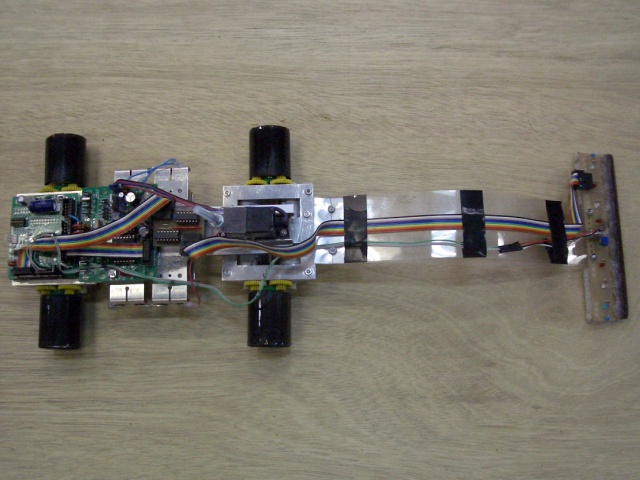
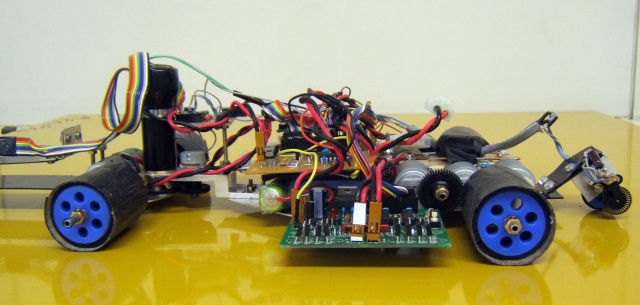
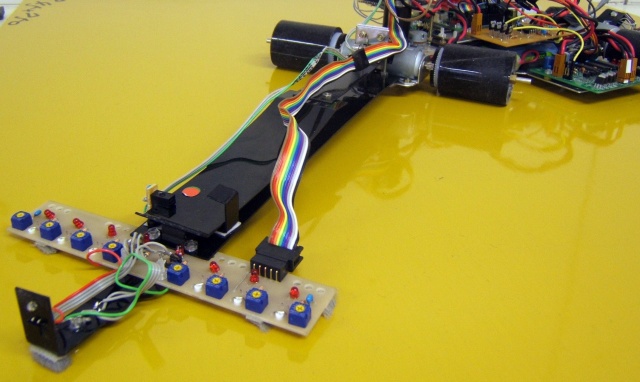
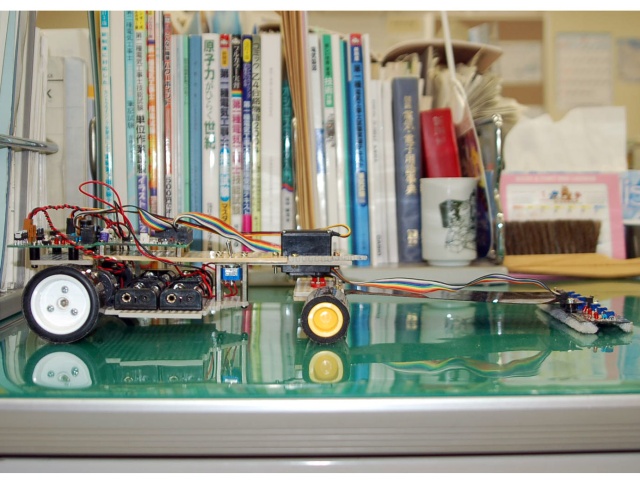
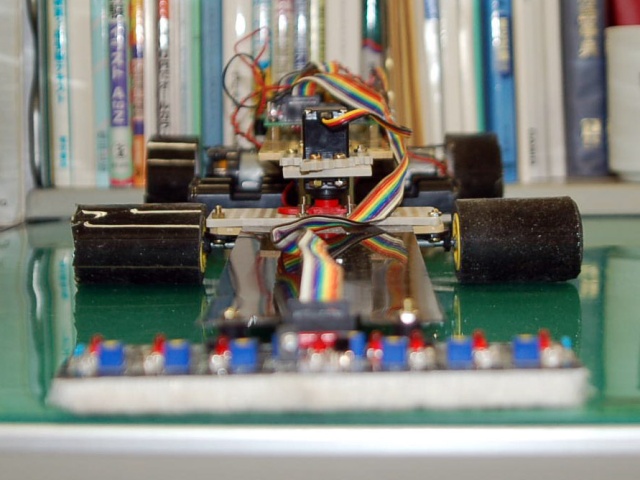
| 兵庫県立相生産業高等学校 閑井 健人君 「非常食」 |
| 内 容 |
詳 細 |
| 長さ関係 |
全長:520mm 全幅:180mm ホイールベース:180mm |
| 重量 |
970g |
| 電池 |
8本 |
| 駆動モータ |
前輪:1輪2個 後輪:1輪2個 合計8個
ギヤ比:8.4:1 加えている電圧:9.6V |
| タイヤ、ホイール |
旋盤加工した直径28mmのホイールに、4mm厚のスポンジを貼り、その上にシリコンシートを貼っている |
| サーボ |
SANWA ERG-WRX
加えている電圧:約8V |
コース検出
センサ |
デジタル8個 |
その他の
センサ |
なし |
| 特 徴 |
キットの部品と基本のプログラムを活用 |
製作で
苦労した点 |
シャーシを金ノコとヤスリで加工するのが大変だった。穴の位置を正確にボール盤で開けるのが難しかった。 |
プログラムで
苦労した点 |
クランクとレーンチェンジの区別と連続カーブの調整 |
|
|
 |
 |
 |
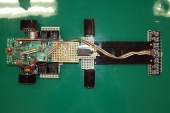
| 上から見たところ |
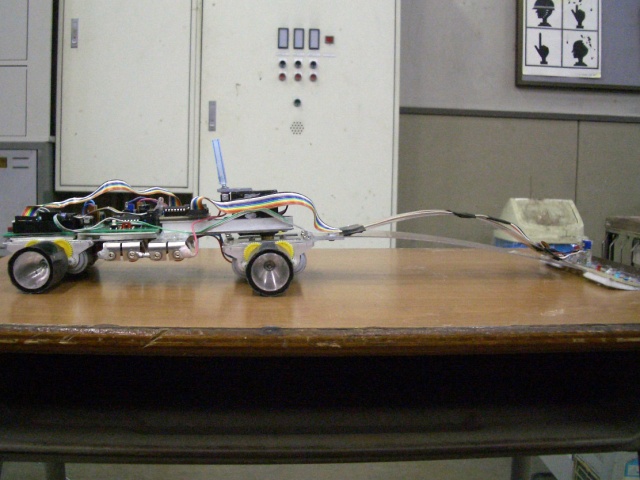
横から見たところ |
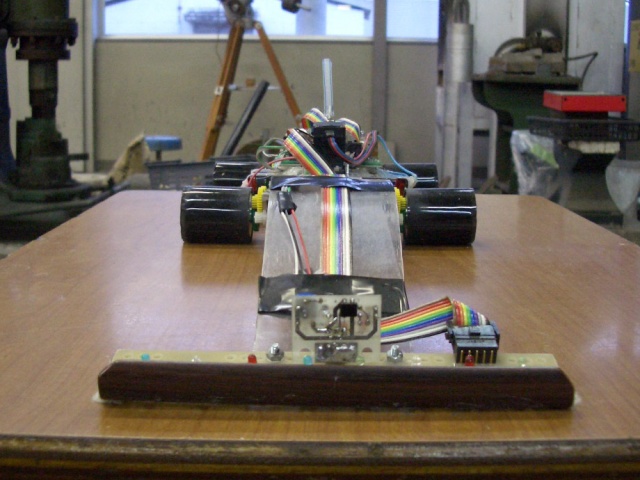
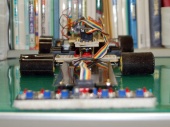
正面から見たところ |
※画像はクリックすると拡大表示します。
|
高校生の部 4位
|
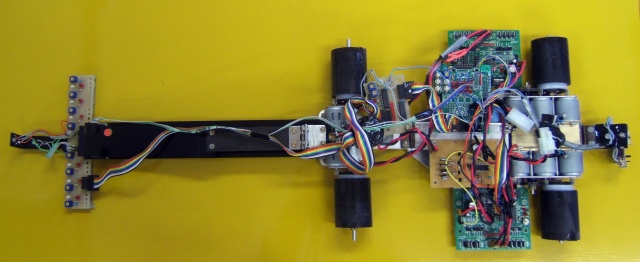
| 熊本県立御船高等学校 今井 幸広君 「グングニル」 |
| 内 容 |
詳 細 |
| 長さ関係 |
全長:680mm 全幅:240mm ホイールベース:215mm |
| 重量 |
1150g |
| 電池 |
ニッカド8本 1000mAh |
| 駆動モータ |
前輪:1輪1個 後輪:1輪3個 合計8個
前輪:60:8 後輪:50:8 加えている電圧:9.6V |
| タイヤ、ホイール |
・ホイール
フィルムケースを加工して製作。直径:31mm 幅:55mm
・タイヤ
フィルムケースに、スポンジシートを貼り付けシリコンシートを巻いた。直径:40mm 幅:55mm |
| サーボ |
マクソンモ−タ Amax22 9V 6W ギヤ比:71:1
加えている電圧:9.6V |
コース検出
センサ |
ラインセンサ6個(S7136) |
その他の
センサ |
マウスを改造したロータリエンコーダ(1A51HR)1個、カーブの先読み(S7136)1個、坂道センサー(1A51HR)1個、スタートセンサ(S7136)1個 |
| 特 徴 |
後輪に6個のモータを使用して、加速とブレーキの性能アップをしました。坂道センサは、センサーアームの他にその押さえ板を取り付け、坂道頂上直前にこの2枚の板が微妙にずれることを検出して動作するように工夫しました。でも、大会当日は調整がうまくいかず動作が不安定でした。 |
製作で
苦労した点 |
最初は前輪2個、後輪2個の合計4個のモーターで製作していましたが、加速があまり良くなかったので、前輪2個、後輪6個に設計変更をしました。どんな走りをするか不安でしたが、昨年先輩が製作してうまく走っていたので決めました。それぞれのパーツの中心を正確にあわせることや、センサーアームの長さの決定、可能な限り車高を低くするのに苦労しました。また、坂道センサーを全国大会直前に変更したので調整に苦労しました。 |
プログラムで
苦労した点 |
カーブのスピードが上がらす、また、コースアウトしやすかったので、ハンドルの角度を何度も修正しましたがうまくいきませんでした。4輪を独立して制御するようにしたので、前後左右のモータのパワーを決定するのにも苦労しました。クランクでのハンドルの切り角、そのときの4輪のパワーバランスを決めるのにも苦労しました。色々と苦労の連続で結局九州大会よりタイムが落ちましたが、この苦労を無駄にしないように来年はもっと上位にいけるように頑張りたいと思います。 |
|
|
 |
 |
 |
| 上から見たところ |
横から見たところ |
斜めから見たところ |
※画像はクリックすると拡大表示します。
|
Basic Class 優勝
|
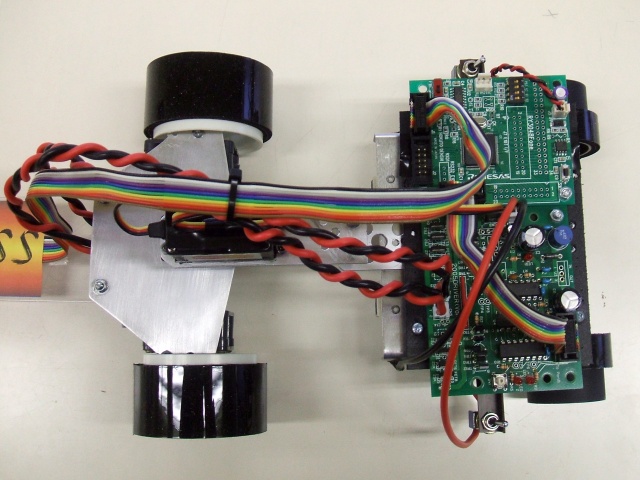
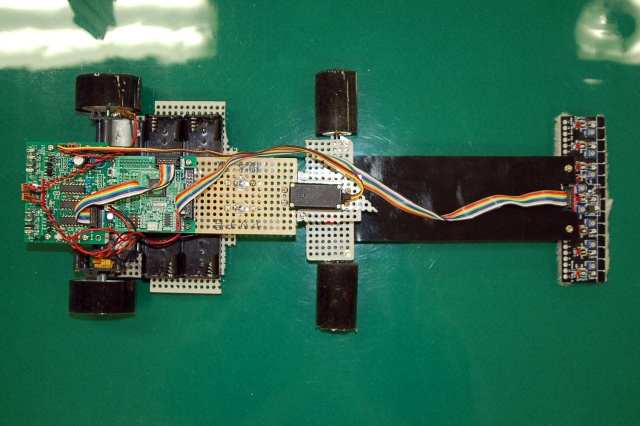
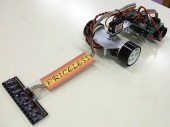
| 熊本県立球磨工業高等学校 小田 耕大君「プライスレス」 |
| 内 容 |
詳 細 |
| 長さ関係 |
全長:480mm 全幅:163mm ホイールベース:168mm |
| 重量 |
510g(電池除く) |
| 駆動方式 |
前輪駆動 |
| タイヤ、ホイール |
ラジコン用ホイールに2mm厚のスポンジシートを2枚巻き、その上にシリコンシートを巻いている。直径60mm。 |
| サーボ |
ハイテック製 HS-425BB |
コース検出
センサ |
デジタル7個(キットのセンサ基板Ver.4) |
| 特 徴 |
・九州地区大会までは後輪駆動だったが、前輪駆動マシンも追加で製作し、並行して調整を行ってきた。前輪駆動にすることでクランクをより速くクリアできるようになった。
・できるだけ軽くなるように、最低限度の強度を残し、いらない部分は穴を開けたり切ったりして「究極の軽量化」を施した。
・後輪は無駄な抵抗を出さないようにベアリングを使用し、スムーズに回転するようにした。
・配線を太くし、電圧降下を抑えた。 |
製作で
苦労した点 |
車体の全ての部品を廃材から再利用したので、穴の位置が若干ずれていたものが多く、全ての部品の中心線を一直線にするのが苦労した。また前輪の軸の上にサーボの軸を持ってくるのが苦労した。前輪のタイヤの直径が大きかったため、クランクを曲がるとき、タイヤと車体が当たらないようにスペースを作るのが苦労した。 |
プログラムで
苦労した点 |
コーナーを曲がるとき、最初は非常にがくがくしていたのでスムーズに曲がるようにサーボの角度を調整するのに苦労した。また車線変更の時に無駄な動きをしないような角度調整に苦労した。 |
|
|
 |
 |
 |
| 上から見たところ |
横から見たところ |
斜めから見たところ |
※画像はクリックすると拡大表示します。
|
Basic Class 準優勝
|
北海道北見工業高等学校 榎本 徹君「やっち号」
|
| 内 容 |
詳 細 |
| 長さ関係 |
全長:473mm 全幅:212mm ホイールベース:205mm |
| 重量 |
約650g |
| 駆動方式 |
後輪駆動 |
| タイヤ、ホイール |
前輪を小さく、後輪を大きくした。シリコンシートを巻き、グリップ力を増加。
前輪の直径:33mm 後輪の直径:54mm |
| サーボ |
ハイテック製 HS-425BB |
コース検出
センサ |
コース検出センサはデジタルを使用。スタートバー検出センサを含めて計8個使用。 |
| 特 徴 |
特徴として目立った点はないものの、前後輪の大きさの違いと、車体とセンサを繋ぐ板の長さは工夫をした。 |
製作で
苦労した点 |
スピードの出るマシン設計と安定性の向上である。駆動輪を小さくしてしまうと、スピードが出ないと感じたため、直径の大きいタイヤにした。前輪を小さくし、タイヤ幅を長くすることで安定性の向上を図った。速度は落ちたかもしれないが、大会でも安定した走りを見せてくれたので、結果的に正しい選択だったと思う。一番辛かったのは、調整中に色々な部品が壊れ、何回も作り直したこと。 |
プログラムで
苦労した点 |
レーンチェンジや通常トレースは、マシンにあった丁度良いプログラミングができた。しかし、クランクを曲がるためのクロスライン検出時の減速は最後まで納得が出来なかった。長い直線があるのを予想していたため、速度が上がってもコースアウトしないようにかなりの減速をさせているのだが、レーンチェンジ後のクランクや急なカーブからのクランクは速度が乗らないため、どうしてもタイムロスになってしまった。細かく調整したのだが、納得のいくようにはならなかったので、それが心残りだった。結局速度を落としたため、コースアウトはしないものの、優勝したマシンとの決定的な差はそこにあったので、苦労した上に残念で仕方がなかった。しかし、周りの環境、友達や先生方の支えがあって作りあげることのできたマシンで準優勝という素晴らしい結果を残せたことは、非常に嬉しかった。 |
|
|
 |
 |
 |
| 上から見たところ |
横から見たところ |
正面から見たところ |
※画像はクリックすると拡大表示します。
|