| �� |
�{�y�[�W�̓��e�́A��ʓ��҂̊F����փA���P�[�g�𑗂�A���������������e���f�ڂ��Ă��܂��B���Z�����������������܂����ږ�̐搶�A�I��̕��X�̂����ӂɊ��Ӑ\���グ�܂��B |
| �� |
�w�Z��{�l�֒��ږ₢���킹�邱�Ƃ͂��Ȃ��悤���肢���܂��B |
|
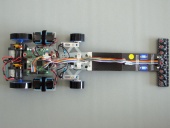
Basic Class�@�D��
 |
| �{�茧���{��H�ƍ����w�Z�@�V���@�S��@�u���Y.tem4�v |
| ���@�e |
�ځ@�� |
| �����W |
�S���F395�o�A�S���F183�o�@�z�C�[���x�[�X�F143�o |
| �d�� |
412g (�Z���T�A�[�����܂ށE�d�r����) |
| �d�r |
�}�C�R�����F�A���J���d�r4�{
���[�^���F�A���J���d�r4�{ |
| �쓮���[�^ |
�O�֍��E�Ɏw�胂�[�^1���g�p
�^�~���n�C�X�s�[�h�M���{�b�N�X�i�M����11.6:1) |
| �^�C���A�z�C�[�� |
�O�ցF���a62mm �^�~���̃X�|�[�c�^�C���Z�b�g�̃z�C�[���g�p
��ցF���a40mm �t�B�����P�[�X�����H |
| �T�[�{ |
�n�C�e�b�N HS-425BB |
�R�[�X���o
�Z���T |
�f�W�^��7��(�Z���T���Ver.4) |
���̑���
�Z���T |
�X�^�[�g�o�[���o�Z���T |
| ���@�� |
�O�쓮�E�A�b�J�[�}���d�l�ŃJ�[�u�ɋ����A�u���[�L�̌������ǂ��ԑ̂ɂȂ��Ă���B�{�f�B�ɂ̓J�[�{���𑽂��g�p���y�ʉ��ɓw�߂��B�f�B�b�v�X�C�b�`��PWM�A�u���[�L�̋����ς��R�[�X�ɑΉ��������肪�ł���悤�ɂ����B |
| ��J�����_ |
�A�b�J�[�}���{�O�쓮�ň��肵�����s���ł���}�V�������̂���ς������B�܂��A�ԑ̂̋��x�������Ȃ��悤�ɂ��Čy�ʉ������B�J�[�u�A�N�����N�ŃX�s�[�h�𗎂Ƃ��Ȃ��ő��s�ł���悤������ς��Ȃ��牽�x�����s�����A�v���O���������ǂ����B |
| ���z |
���O�́A�܂����D���ł���Ƃ͎v���Ă��Ȃ������̂łƂĂ������������ł��B�����̃e�[�}�ł���u�O�쓮�E�A�b�J�[�}���v�u�y�ʉ��v���u�����v�ɂȂ���\�I�ł͍ő��^�C�����o�����Ƃ��ł��A����ɗD�����邱�Ƃ��o���܂����B���̌��ʂ́A�搶�⒇�Ԃ̃T�|�[�g�̂��A���Ǝv���Ă��܂��B�x���Ă������������ׂĂ̐l�Ɋ��ӂ������Ǝv���܂��B |
|
 |
 |
 |
 |
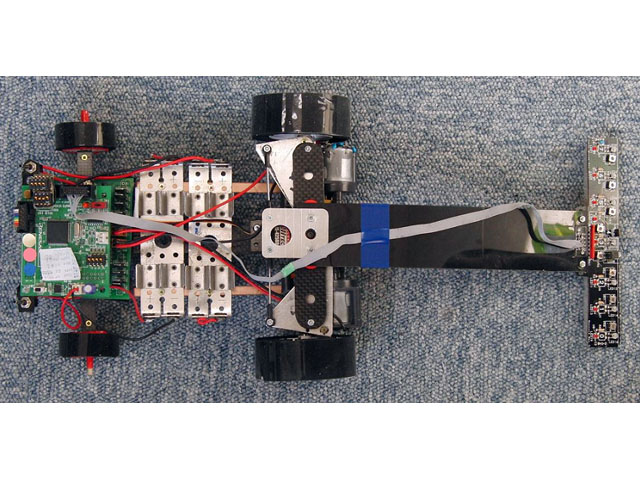
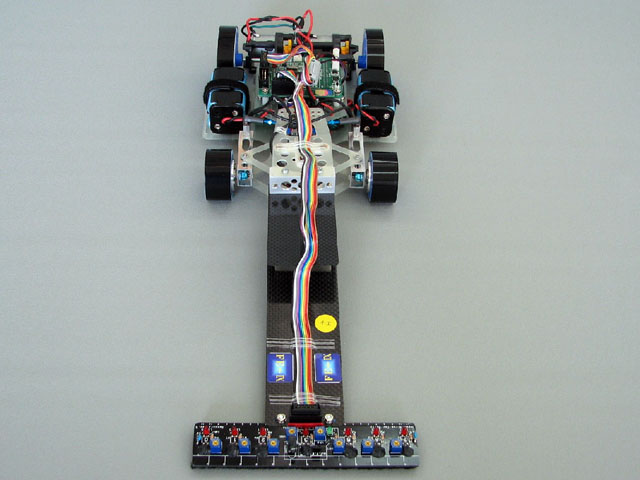
| �ォ�猩���Ƃ��� |
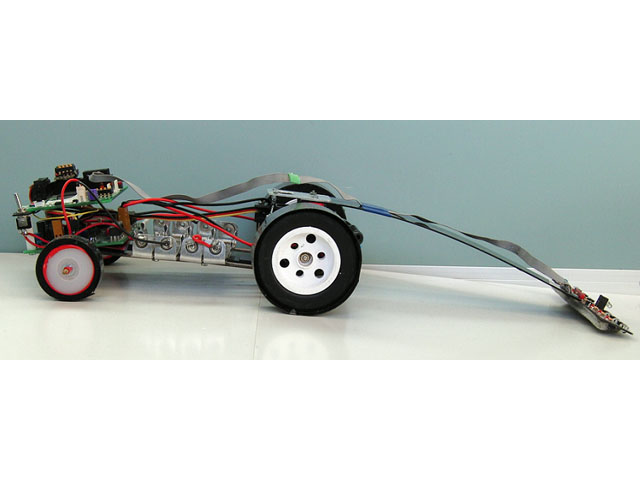
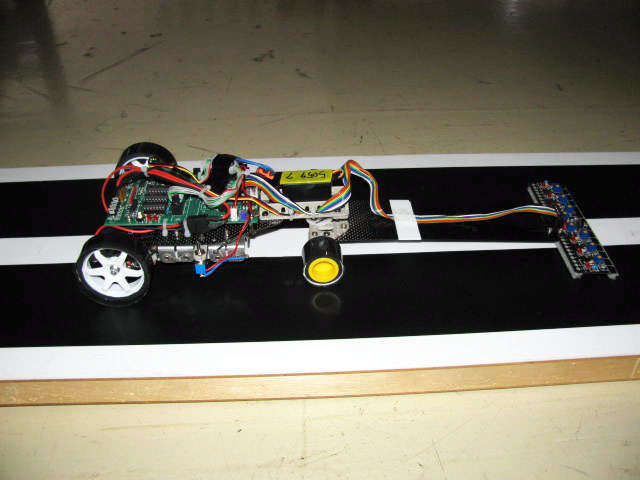
�����猩���Ƃ��� |
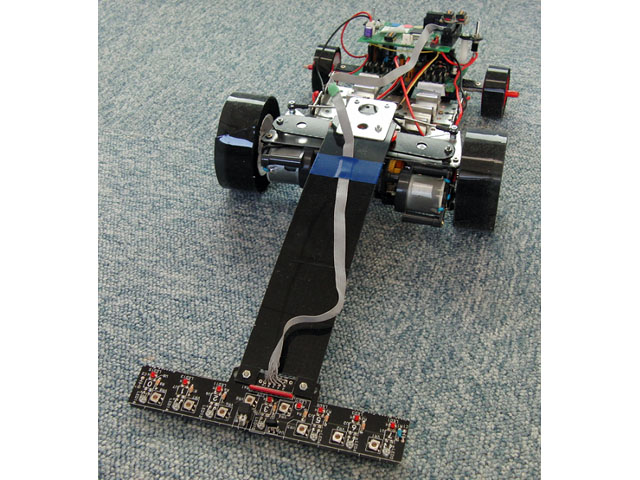
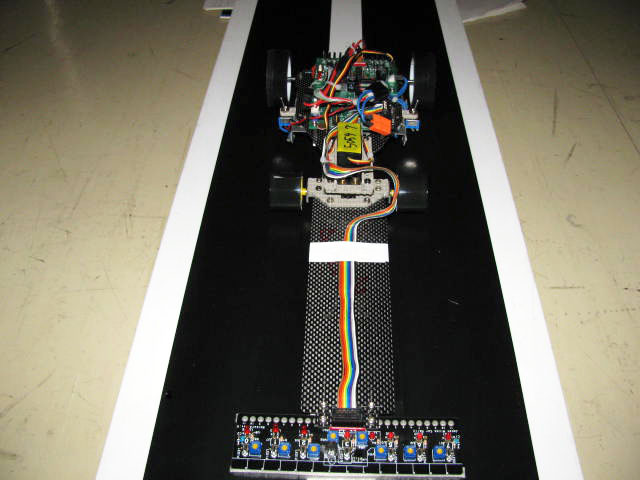
�߉����猩���Ƃ��� |
|
Basic Class�@���D�� |
| ����H�Ƒ�w�������䍂���w�Z�@����@�G��@�u�e�d�|�\�v |
| ���@�e |
�ځ@�� |
| �����W |
�S���F465mm�A�S���F168mm�A�z�C�[���x�[�X�F155mm
�O�փg���b�h���F130mm�A��փg���b�h���F135mm |
| �d�� |
��490g(�d�r�͏���) |
| �d�r |
�}�C�R�����Feneloop lite4�{
���[�^���Feneloop lite4�{ |
| �쓮���[�^ |
��֍��E�Ɏw�胂�[�^1���g�p
�^�~���n�C�X�s�[�h�M���{�b�N�X�i�M����11.6:1) |
| �^�C���A�z�C�[�� |
�O��ւƂ��l�b�i�C�����ۖ_����Ղʼn��H���A�|���G�`�����X�|���W���͂߂Ă���܂��B��ւ͊O���ɕʂ̃|���G�`�����X�|���W���������܂����B
�O�փ^�C�����a�F41mm�@��փ^�C�����a�F61mm |
| �T�[�{ |
SANWA SRM-102Z |
�R�[�X���o
�Z���T |
�f�W�^���Z���T7�i�Z���T���Ver.4�j |
���̑���
�Z���T |
�X�^�[�g�o�[���o�Z���T |
| ���@�� |
�O�֑��Ǖ������A�b�J�[�}�������ɂ��āA�f�����ǎ�肪�ł���悤�ɂ��܂����B��փ^�C�������ׂ����āA�^�C���̓]�����R���ł��邾�����������܂����B�R�[�X�������ł������ǂݎ�邽�߂ɁA�Z���T���t���A�[�������܂����B�Z���T������ˏオ��Ȃ��悤�ȍH�v���s���܂����B |
| ��J�����_ |
�O�֑��Ǖ������A�b�J�[�}�������ɂ������ƂŁA�O�֍��E�̐U��p�x�ƃZ���T�[�A�[���̐U��p�x�̊W���ł���悤�ɂ��Ă���܂��B�������A���s��Ԃ��ǂ̂悤�ɕω����邩�K���Ȏ��t���ʒu�����܂��ɉ����ł��Ă��܂���B�܂��A�v���O�����ł̓N�����N��[���`�F���W���ł��邾���X�s�[�h�𗎂Ƃ��Ȃ��Œʉ߂ł���悤�ɁA���������x���J��Ԃ������Ƃł��B |
| ���z |
���߂Ă̒n����E�S�����ɏo�ꂵ�A�F�X�Ȏv���o���ł��܂����B���ɑS�����ł͗\�I�̏��ʂ�6�ʂ������̂ŁA�����g�[�i�����g��ł̏�ʓ��܂͓���Ǝv���܂��������D�����邱�Ƃ��ł���ϖ������Ă��܂��B |
|
|
 |
 |
 |
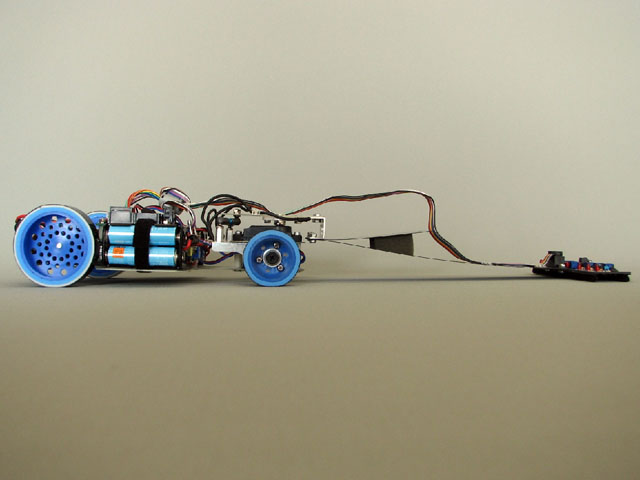
| �ォ�猩���Ƃ��� |
�����猩���Ƃ��� |
���ʂ��猩���Ƃ��� |
|
Basic Class�@��3��
|
�H�c�������H�����w�Z�@���@�\��@�u�Ėk�v
|
| ���@�e |
�ځ@�� |
| �����W |
�S���F440mm�A�S���F165mm�A�z�C�[���x�[�X�F165mm |
| �d�� |
475g |
| �d�r |
�}�C�R�����F�A���J���d�r4�{�@���[�^���F�A���J���d�r4�{ |
| �쓮���[�^ |
��֍��E�Ɏw�胂�[�^1���g�p
�^�~���n�C�X�s�[�h�M���{�b�N�X�i�M����11.6:1) |
| �^�C���A�z�C�[�� |
�s�̃��W�R���z�C�[�����g�p�����B
�O�ցF35mm�@��ցF56mm |
| �T�[�{ |
�n�C�e�b�N���@HS425BB |
�R�[�X���o
�Z���T |
�f�W�^���Z���T7�i�Z���T���Ver.4�j |
���̑���
�Z���T |
�X�^�[�g�o�[���o�Z���T |
| ���@�� |
�ꖇ�V���[�V�Ƀ}�C�R���{�[�h��A���[�^�h���C�u��A�d�r�{�b�N�X��z�u���邱�ƂŁA�g�ݗ��Ă���e�i���X���e�Ղł��鎖�������ł��B�T�[�{�ւ̕��S�����炷���߁A�O�ւ̃g���b�g���R���p�N�g�ɂ��A���a�̏������^�C��(�g���b�N�^�C��)���g�p���Ă��܂��B |
| ��J�����_ |
�O�֕��Ɏg�p���Ă��鎲�̓t���C�X�Ղʼn��H���܂������A�ŏ��͐��x���������x�����s���܂����B�������A�J��Ԃ���Ƃ��邱�ƂŐ��x�ǂ��������������邱�Ƃ��ł��܂����B�V���[�V�̓J�[�{�����g�p���āA�{�[���Ղł̌�������`���ȂǁA��d�グ����J���܂����B |
| ���z |
�ۑ茤���̔Lj��̋��͂����������炱���A���̂悤�Ȑ��т��o�����Ƃ��ł��܂����B���̃}�C�R���J�[�̐���Ɋւ��A���H�Z�p�����サ�����Ƃ��A�ƂĂ����ꂵ���ł��B�S�����֏o��ł��ǂ��v���o���ł��܂����B |
|
|
 |
 |
 |
| �ォ�猩���Ƃ��� |
�����猩���Ƃ��� |
���ʂ��猩���Ƃ��� |
|