| �� |
�{�y�[�W�̓��e�́A��ʓ��҂̊F����փA���P�[�g�𑗂�A���������������e���f�ڂ��Ă��܂��B���Z�����������������܂����ږ�̐搶�A�I��̕��X�̂����ӂɊ��Ӑ\���グ�܂��B |
| �� |
�w�Z��{�l�֒��ږ₢���킹�邱�Ƃ͂��Ȃ��悤���肢���܂��B |
|
Basic Class�@�D��
 |
| ���R�����ʖ���썂���w�Z�@�����@����@�u�y�d�q�n�v |
| ���@�e |
�ځ@�� |
| �����W |
�S���F470�o�A�S���F150�o�@�z�C�[���x�[�X�F155�o |
| �d��(�d�r����) |
640g�܂���655g |
| �d�r |
�}�C�R�����Feneloop lite 4�{
���[�^���Feneloop lite 4�{�A�܂��̓A���J��4�{ |
| �쓮���[�^ |
��֍��E�Ɏw�胂�[�^1���g�p
�^�~���n�C�X�s�[�h�M���{�b�N�X�i�M����11.6:1) |
| �^�C���A�z�C�[�� |
�O�ցF���a40mm�@��ցF���a61mm
�s�̂̃��W�R���p�z�C�[�����O���C���_�[�ō���Ď����X���Ō`���B
���a�́A�V���R���e�[�v�̏d�ˊ��Ŕ������B |
| �T�[�{ |
ES-519 |
�R�[�X���o
�Z���T |
�f�W�^��8��(�Z���T���Ver.5) |
���̑���
�Z���T |
�X�^�[�g�o�[���o�Z���T |
| ���@�� |
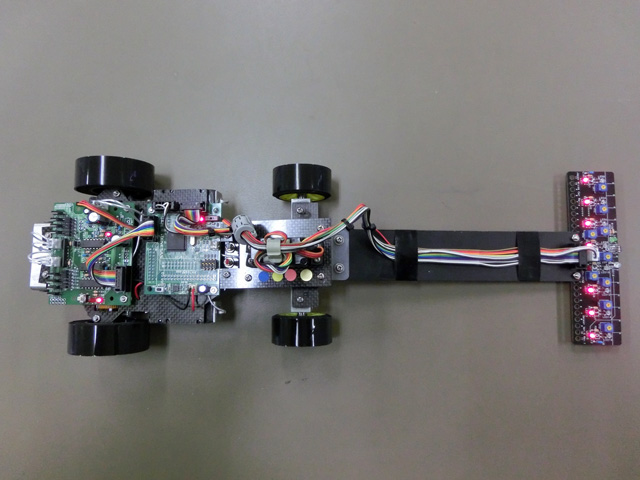
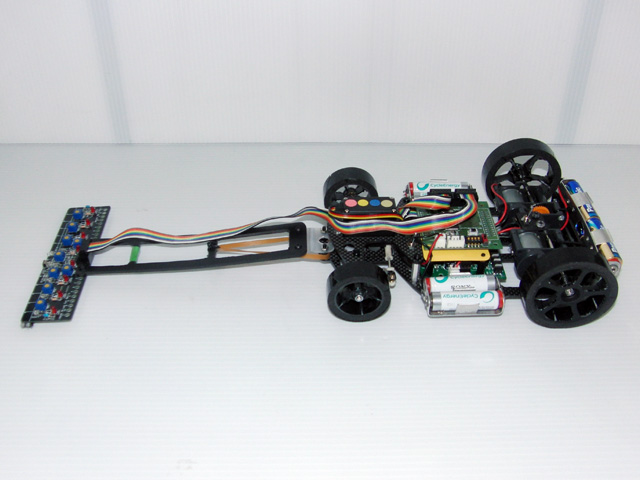
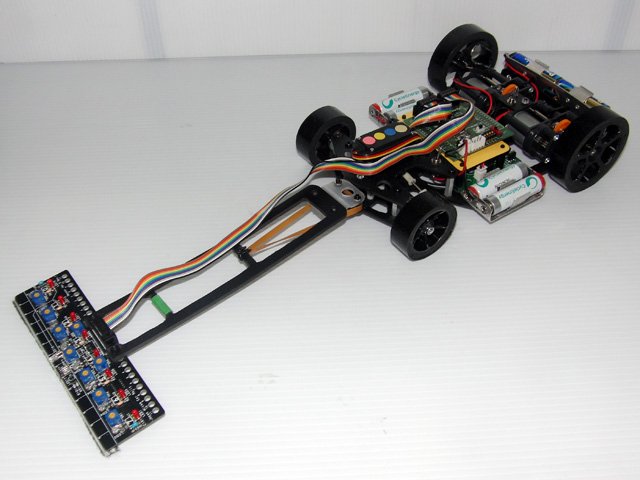
�V���[�V�ɃJ�[�{�����g�p���āA�ԑ̂̌y�ʉ��ƍ������������܂����B�J�[�u�Ŋ��炩�ȑ��s���ł���悤��쓮�ɂ��āA8�Z���T�̌��o��Ԃ𑝂₵�܂����B�d�r2�{���ԑ̂̌��Ɏ��t���āA���������O�쓮�̏d�ʃo�����X�Ƃ��A�u���[�L���ɂ������ւ̕�����}���܂����B |
| ��J�����_ |
���c�t���̎��ɔ��c�̎g�p�ʂ����Ȃ�����悤�ɂ��܂����B�J�[�u�Ŋ��炩�ȑ��s���ł���悤�ɂ��邽�߁A���ւƊO�ւ�PWM�̒����ƃZ���T�A�[���̒����̃}�b�`���O�Ɏ��Ԃ�������܂����B |
| ���z |
�S�����\�I�ł́A�쓮�^�C���̒��a��59.5mm�Őݒ肵�Ă��܂������A�����E�J�[�u�Ƃ��ɑ��s�^�C�����オ��܂���ł����B�\�I��ʂ̐l�����͑�a�^�C�������������̂ŁA�����ł͎v�����ăV���R���e�[�v�����d�ɂ�������61mm�ɂ����瑬���Ȃ�܂����B�\�I�̒i�K�ł͗D���ɂ͒������^�C���ł������A���������Ď���̗l�q���ώ@���邱�Ƃł������ʂ����܂�܂����B�Ō�܂Ŋ撣��ėǂ������ł��B�n����E�S�������x���ĉ����������X�Ɋ��ӂ��܂��B���肪�Ƃ��������܂����B |
|
 |
 |
 |
 |
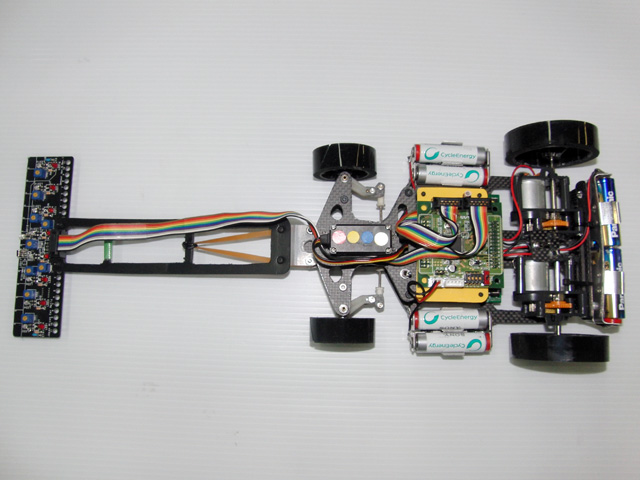
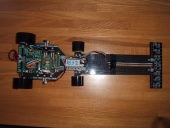
| �ォ�猩���Ƃ��� |
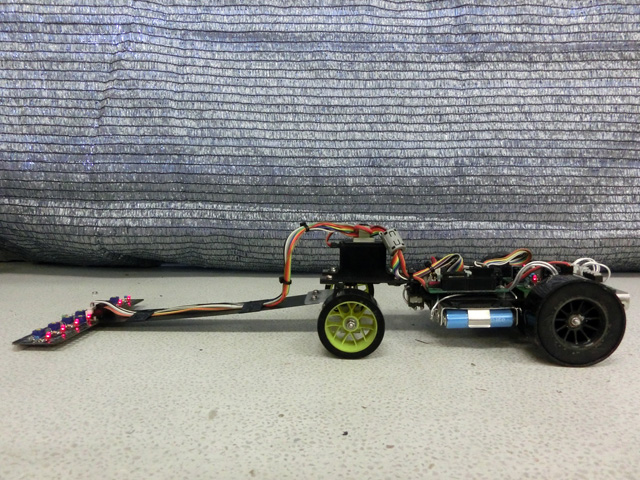
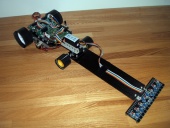
�����猩���Ƃ��� |
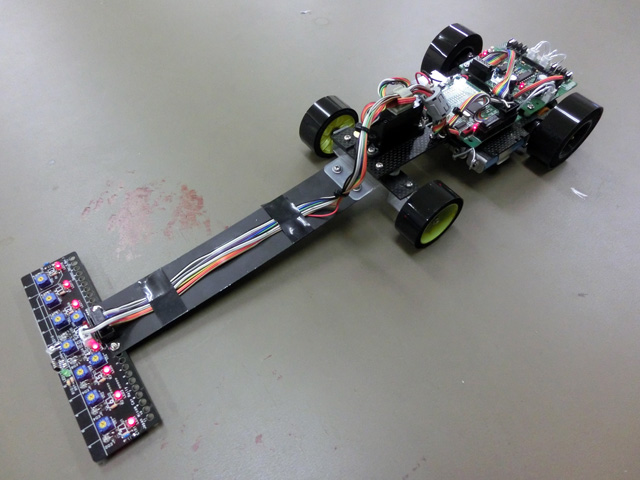
�߉����猩���Ƃ��� |
|
Basic Class�@���D�� |
| �a�̎R�����I�k�H�ƍ����w�Z�@�ꑺ�@�X�с@�u�I�k�K�[���Q�v |
| ���@�e |
�ځ@�� |
| �����W |
�S���F445mm�A�S���F160mm�A�z�C�[���x�[�X�F150mm |
| �d��(�d�r����) |
594g |
| �d�r |
�}�C�R�����FCycleEnergy 4�{
���[�^���F�A���J��EVOLTA 4�{ |
| �쓮���[�^ |
��֍��E�Ɏw�胂�[�^1���g�p
�^�~���n�C�X�s�[�h�M���{�b�N�X�i�M����11.6:1) |
| �^�C���A�z�C�[�� |
�O�փ^�C�����a�F45mm�@��փ^�C�����a�F65mm
�s�̃��W�R���p�z�C�[����؍���H |
| �T�[�{ |
HS-430BH |
�R�[�X���o
�Z���T |
�f�W�^���Z���T8�i�Z���T���Ver.5�j |
���̑���
�Z���T |
�X�^�[�g�o�[���o�Z���T |
| ���@�� |
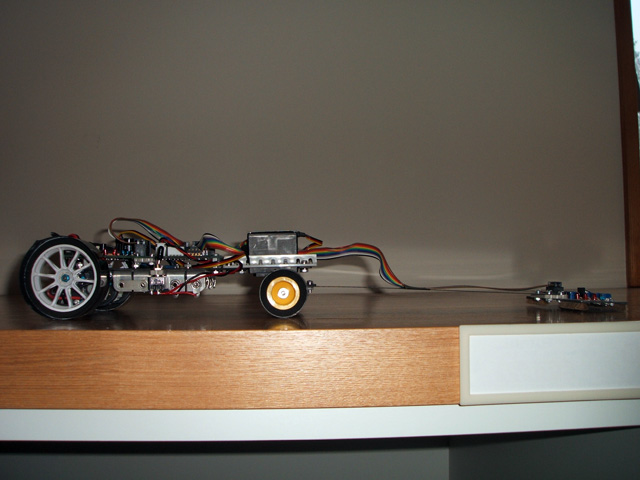
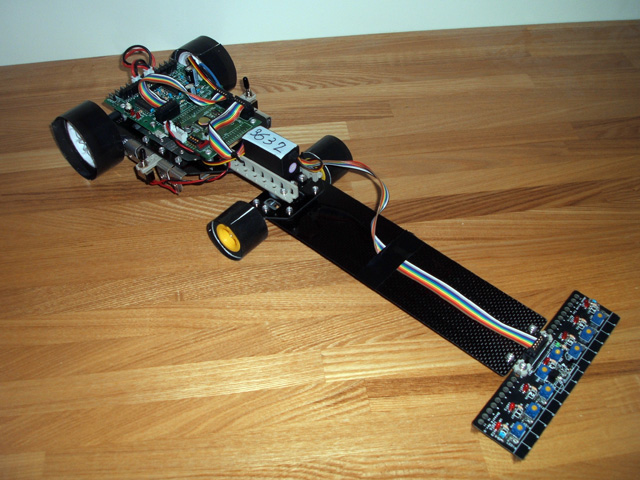
�V���[�V�ɂ́A�w�Z�Ńv���v���O���Ă��č�����J�[�{���v���[�g���g�p���Čy�ʂȎԑ̂삵�܂����B�ߋE���I�������A�炵�ēO��I�Ȍy�ʉ������A�l�W�������l�W���g�p���y�ʉ���}��܂����B�X�e�A�����O�̓��W�R���̕��i���g�p���A�����ԂƓ����A�b�J�[�}���E�W�����g���ɂ��܂����B |
| ��J�����_ |
�n���_�t���⌊�����E�J�[�{���̐؍�Ȃǂ��ׂď��߂ĂŁA��y�ɋ����Ă��炢�Ȃ��琻�삵�܂����B�v���O���������߂ĂłȂ��Ȃ������ł�����J���܂����B�\�I�ɂ����ă��[���`�F���W�ň���������u���[�L�̂�������Y�݂܂����B |
| ���z |
�����ȂƂ��돀�D���ł���Ǝv���Ă��Ȃ������̂ł��ꂵ���ł��B�ł������ŁA0.1�b���ŕ������̂͂����������������ł����ǂ��o���ɂȂ�܂����B�S��2�ʂƂ������ʂ͋����Ē������搶�⋦�͂��ĉ���������y���A�܂��A�F�X�ȕ��ɉ������Ē������������ł��B�{���ɂ��肪�Ƃ��������܂����B |
|
|
 |
 |
 |
| �ォ�猩���Ƃ��� |
�����猩���Ƃ��� |
�߉����猩���Ƃ��� |
|
Basic Class�@��3��
|
�H�c���������Ėk�����w�Z�@�����@�đ��@�u�����сv
|
| ���@�e |
�ځ@�� |
| �����W |
�S���F445mm�A�S���F165mm�A�z�C�[���x�[�X�F165mm |
| �d��(�d�r����) |
600g |
| �d�r |
�}�C�R�����F�j�b�P�����f�d�r4�{�@���[�^���F�A���J���d�r4�{ |
| �쓮���[�^ |
��֍��E�Ɏw�胂�[�^1���g�p
�^�~���n�C�X�s�[�h�M���{�b�N�X�i�M����11.6:1) |
| �^�C���A�z�C�[�� |
�O�ցF35mm�@��ցF56mm
���W�R���z�C�[�����g�p���A�X�|���W���������� |
| �T�[�{ |
HS430BH |
�R�[�X���o
�Z���T |
�f�W�^���Z���T7�i�Z���T���Ver.4.1�j |
���̑���
�Z���T |
�X�^�[�g�o�[���o�Z���T |
| ���@�� |
���C���V���[�V��A�Z���T�o�[�̑f�ނ��J�[�{���ɂ��āA�ԑ̂̌y�ʉ��ƍ������������Ă��܂��B�L�b�g�̃}�C�R���J�[���A�g�p����l�W�̖{���╔�i�������Ȃ��A�g�ݗ��Ă���e�i���X���e�Ղł��B�T�[�{�ւ̕��S���l���O�֕����̉��d�����炵�A�n���h���̐��ǂ����Ă��܂��B�܂��A�R�[�X�������ł������ǂݎ�邽�߂ɁA�Z���T�o�[�����Ă��܂��B�����āA�z�������ꂢ�ɂ܂Ƃ߂Ă��܂��B |
| ��J�����_ |
�������Ă�����K���ł͒Z���R�[�X�����ݒu���邱�Ƃ��ł����A�����R�[�X�ő��s�����邽�߂ɓy���͘L���ɃR�[�X��ݒu���đ��s���K���Ă��܂����B�����R�[�X�ő��点��ƒE�ւ������APWM�̒����ɋ�J���܂����B���Ƀn�[�t���C���ɐݒu���ꂽ�d���S���̃K�[�h���[���ɐڐG���Ȃ��悤�ȃn���h���̐�p����ւƊO�ւ�PWM�̒�������������ł��B |
| ���z |
�\�I1��ڂɃn�[�t���C���ŒE�ւ��Ă��܂��܂������A�v���O��������������2��ڂŃ^�C�����c�����Ƃ��ł��A�ƂĂ����ꂵ�������ł��B3�ʂƂ������ʂɖ������Ă��܂����A3�ʌ����Ń~�X�����Ă��܂��c�O�ł��B1�ʁA2�ʂ̃}�V���Ǝ����̃}�V���̍����ǂ��ł��܂�Ă��邩�����������ł��B�}�C�R���J�[����邤���ŁA���̂Â���̊�b���w�Ԃ��Ƃ��ł��܂����B�܂��A���X�R�[�X�����e�i���X�����Ă��ꂽ��y�����ɂ͊��ӂ��Ă��܂��B��y�����́A���N�x������֏o�ꂷ��̂ŗl�X�ȋZ�p��`���Ă��������ł��B |
|
|
 |
 |
 |
| �ォ�猩���Ƃ��� |
�����猩���Ƃ��� |
�߉����猩���Ƃ��� |
|