| �� |
�{�y�[�W�̓��e�́A��ʓ��҂̊F����փA���P�[�g�𑗂�A���������������e���f�ڂ��Ă��܂��B���Z�����������������܂����ږ�̐搶�A�I��̕��X�̂����ӂɊ��Ӑ\���グ�܂��B |
| �� |
�w�Z��{�l�֒��ږ₢���킹�邱�Ƃ͂��Ȃ��悤���肢���܂��B |
|
Basic Class�@�D��
 |
| ���Q�������R�H�ƍ����w�Z�@����@����@�u�`�h�d�r�x�v |
| ���@�e |
�ځ@�� |
| �����W |
�S���F570�o�A�S���F145�o�@�z�C�[���x�[�X�F170�o |
| �d��(�d�r����) |
628g |
| �d�r |
�}�C�R�����Feneloop lite 4�{
���[�^���F�A���J��EVOLTA 4�{ |
| �쓮���[�^ |
�O�֍��E�Ɏw�胂�[�^1���g�p
�^�~���n�C�X�s�[�h�M���{�b�N�X�i�M����11.6:1) |
| �^�C���A�z�C�[�� |
�O�ցF���a61mm�@��ցF���a42mm
�s�̃��W�R���p�z�C�[�����g�p���A�X�|���W�������Ă��� |
| �T�[�{ |
�T����:SRM-102Z |
�R�[�X���o
�Z���T |
�f�W�^��7��(�Z���T���Ver.4) |
���̑���
�Z���T |
�X�^�[�g�o�[���o�Z���T |
| ���@�� |
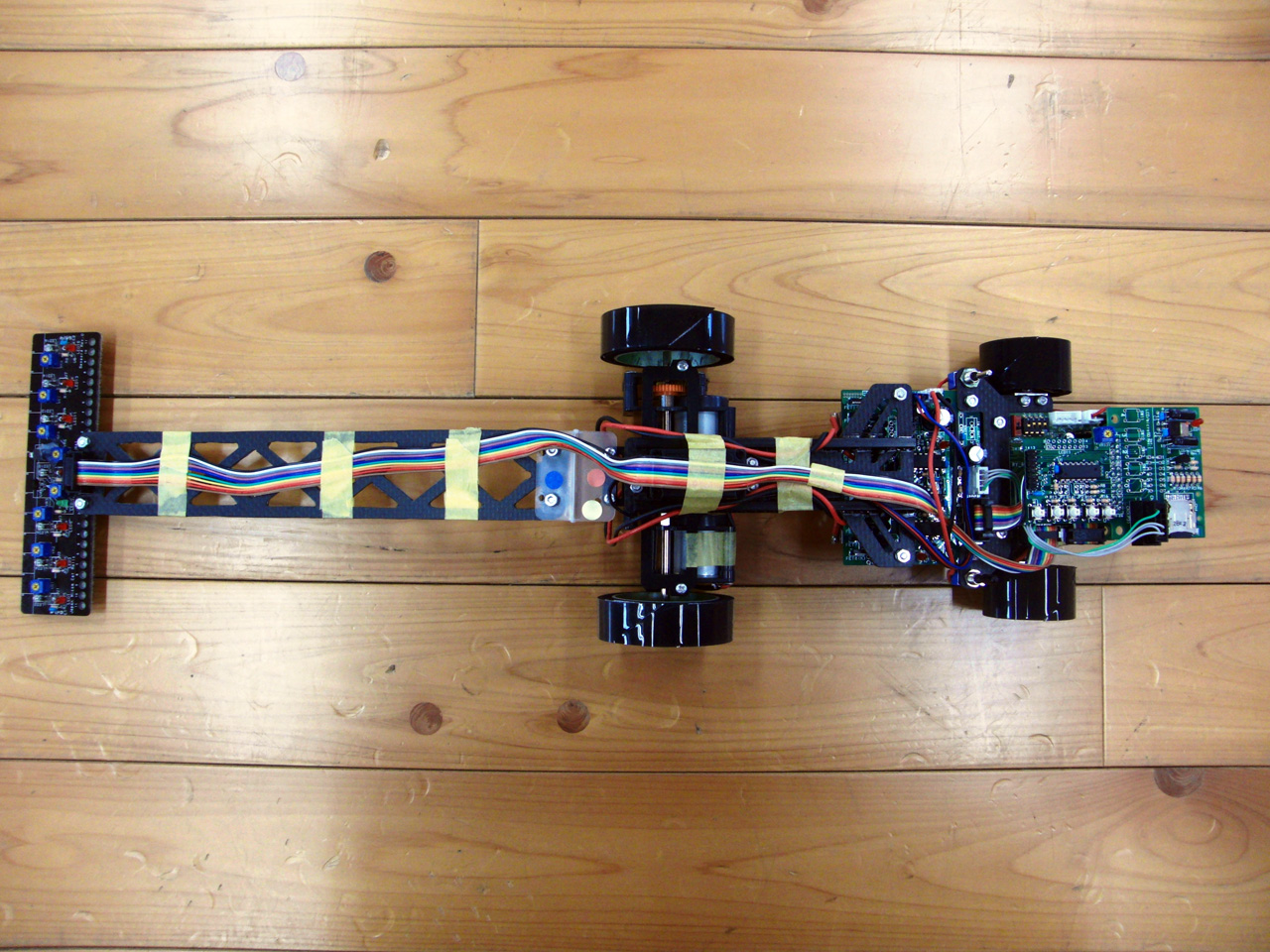
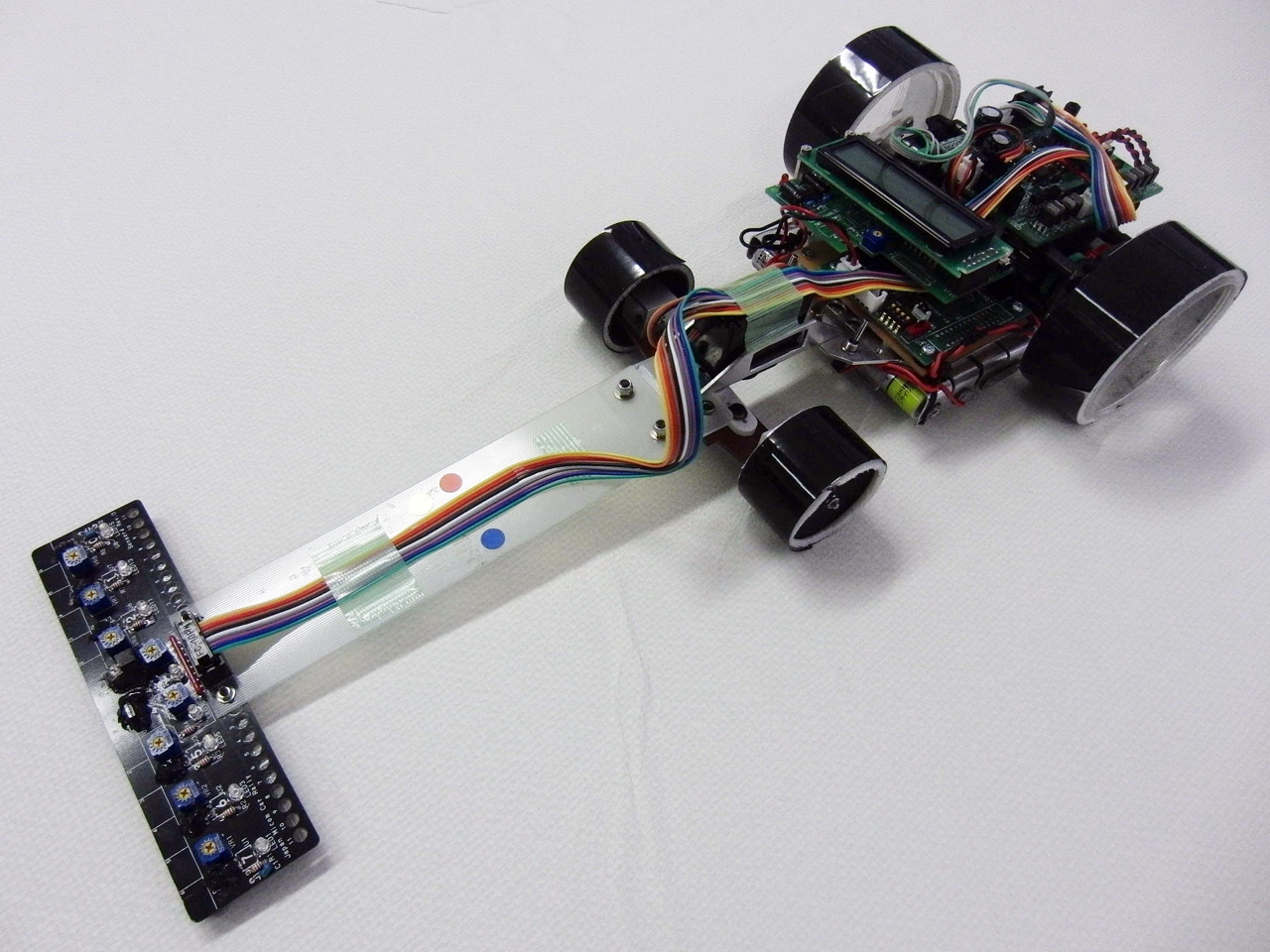
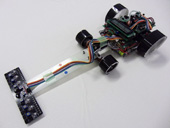
�O�쓮�ŁA�J�[�u��N�����N�𑬂����s�ł���悤�ɂ��܂����B�{�f�B�ɂ̓J�[�{�����g�p���y�ʉ����܂������A�l������ɃT�[�{����̕ύX�ƃ��[�^���̓d�r�ɃA���J�����g�p�������Ƃɂ���Ă��Ȃ�d���Ȃ��Ă��܂��܂����B�J�[�u�ł̃T�[�{�̋Ȃ��p���Ȃ�ׂ����Ȃ��ł���悤�ɁA�Z���T�[�o�[�߂ɐv���܂����B
|
| ��J�����_ |
�l�����ł́A�J�[�u��N�����N�Ńu���[�L�����������ɁA�T�[�{��t��Z���T�[�o�[�̂��Ȃ�ŃZ���T��^�C�����U�����A���܂��g���[�X�ł��Ȃ���������܂����B�����ŁA�T�[�{��t�ɂ̓J�[�{���p�p�C�v�ŕ⋭�����A�Z���T�[�o�[�͏������߂̑f�ނō�蒼���܂����B�������Ńu���[�L���������Ƃ��̐U�����y�����A�g���[�X�����܂������悤�ɂȂ�܂����B�܂��A�s�̂̃z�C�[���̎�ނ�^�C�����A���a�Ȃǂ��F�X�Ǝ����A��ԑ��������g�ݍ��킹�ő��ɗՂ݂܂����B�^�C�����ւ�邽�тɃJ�[�u�ł̊p�x��o�͂����A�ƂĂ���ςł����B |
| ���z |
���̐��삵���}�C�R���J�[�́A�y�����d�����A��쓮�ɕ����Ȃ��悤�ȃX�s�[�h���o����悤�ɂ��܂����B���O���̎����ł͎v�����悤�ɑ��炸�A�{�ԑO�ł̒����ƂȂ�܂����B���ʂƂ��ẮA����ȏ�Ȃ����т��c�����Ƃ��ł��܂����B�����1���狳���Ă����������搶��ꏏ�ɐ���⒲�������A�������Ă��ꂽ�ۑ茤���̒��Ԃ̂������ł��B���肪�Ƃ��������܂����B |
|
 |
 |
 |
 |
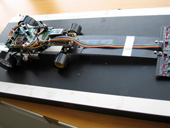
| �ォ�猩���Ƃ��� |
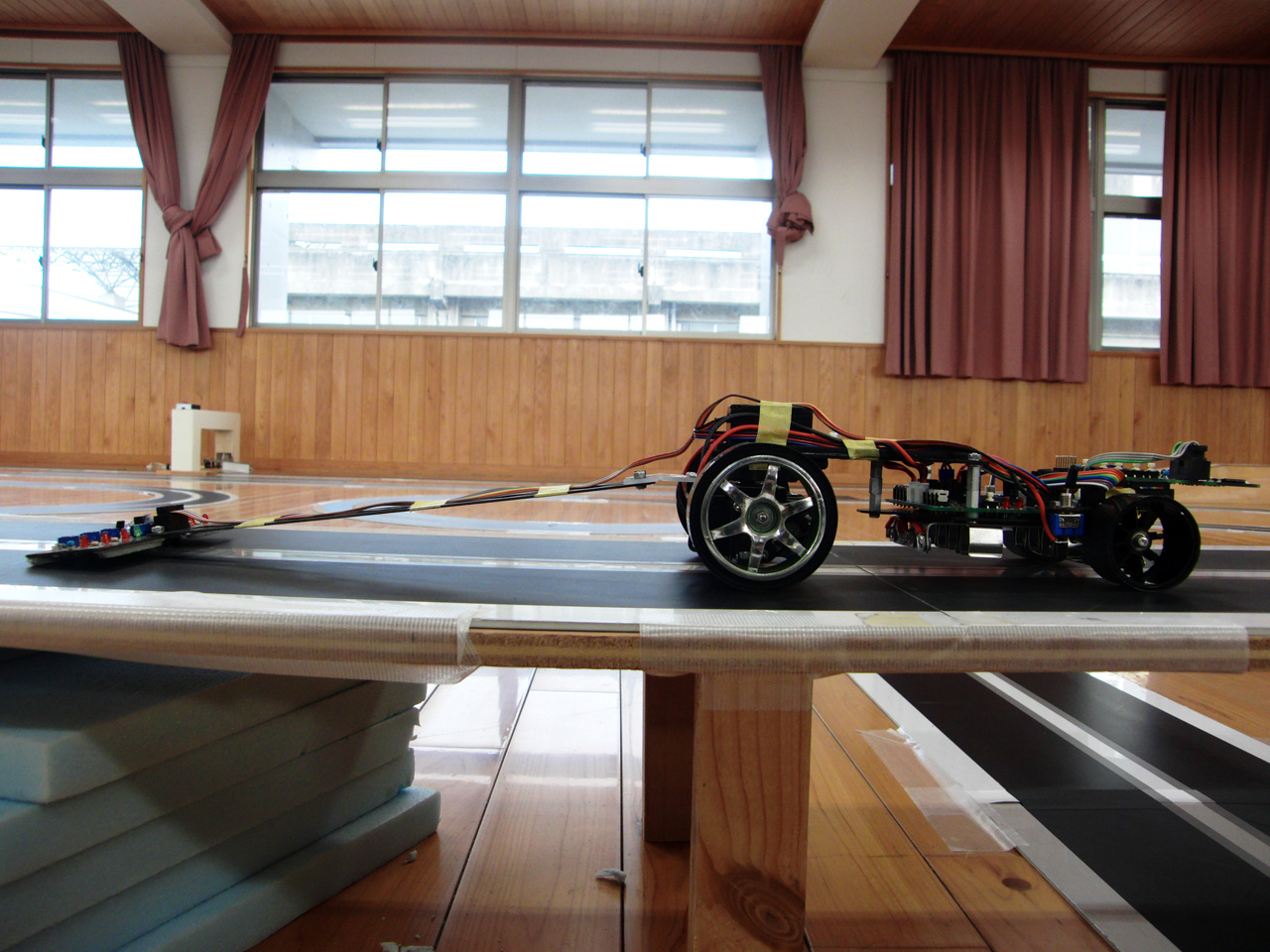
�����猩���Ƃ��� |
�߉����猩���Ƃ��� |
|
Basic Class�@���D�� |
| ���������˔��H�ƍ����w�Z�@�a��@���K�@�u�s�s�g�r�|�����v |
| ���@�e |
�ځ@�� |
| �����W |
�S���F405mm�A�S���F165mm�A�z�C�[���x�[�X�F140mm |
| �d��(�d�r����) |
687g |
| �d�r |
�}�C�R�����F�j�b�J�h4�{
���[�^���F�j�b�J�h4�{ |
| �쓮���[�^ |
��֍��E�Ɏw�胂�[�^1���g�p
�^�~���n�C�X�s�[�h�M���{�b�N�X�i�M����18:1) |
| �^�C���A�z�C�[�� |
�O�փ^�C�����a�F43mm�@��փ^�C�����a�F71mm
�z�[���Z���^�[�ōw�������p�[�c�P�[�X�𗬗p |
| �T�[�{ |
JR�T�[�{�FES519 |
�R�[�X���o
�Z���T |
�f�W�^���Z���T7�i�Z���T���Ver.4�j |
���̑���
�Z���T |
�X�^�[�g�o�[���o�Z���T |
| ���@�� |
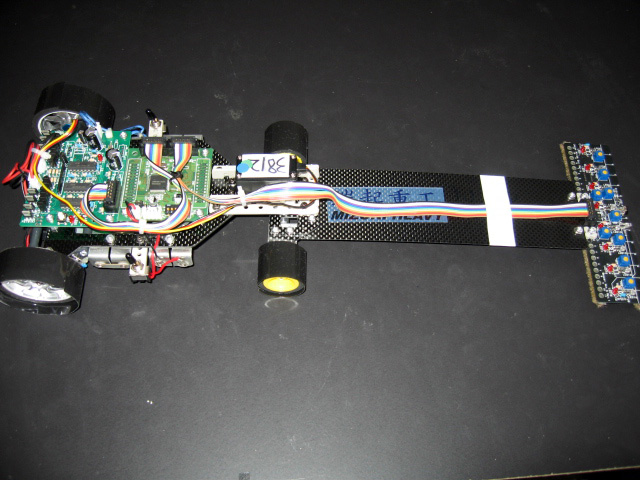
���������肷��悤�ɁA�쓮���̃z�C�[�����ȑO�̃}�V�������傫�����܂����B���O���̎����ȂǂŁA�f���������ł���悤�ɉt�����g���Đ��l�̕ύX���ł���悤�ɂ��Ă��܂��B������C�����ȒP�ɂł���悤�ɁA�ł��邾���V���v���ȍ\���ɂ���悤�ɁA�}�V���̐v�����܂����B |
| ��J�����_ |
�t���[����T�[�{�̃X�e�C�Ȃǂ�S�Ď��ƂŐ��삵�܂����B�H��@�B�̈����ɂ�����Ă��Ȃ������̂ŁA���Ȃ�̎��ԂƎ�Ԃ��|����܂����B���ɁA������������ۂɎ��m�R���g���ăA���~������Ƃ���ϋ�J���܂����B����������ɃZ���T�̓ǂݎ��ʒu��Ɩ��̓���������ʏ�ƈႤ���߁A���������ɂ��̂܂ܗ����邱�Ƃ�����܂������A�ԊO��LED�̏㑤���B�����ƂŁA�ǂݎ��̌덷���������Ƃő��s�ł���悤�ɂȂ�܂����B�d�r�̎�ނ�[�d�̏Ȃǂő����������Ă���̂ŁA��ԗǂ��d�r��T������A�[�d�ɍ��킹�Đ��l��ς����肷��K�v������A�d�r�ƌ��������Ē�������̂���ςł����B |
| ���z |
�����́A���i���K���Ă���ꏊ�ƏƖ��̋���Ⴄ�̂ŁA�����ɍ��킹���Z���T�̔����ɂ���K�v������A��肭���邩�s���ł������A�\�I�ŏ�肭�������̂ň��S���Ă��܂��A�܂��������g�[�i�����g�Ɏc��Ƃ͎v���Ă��Ȃ������̂œd�r�̏[�d���s�\���ŗ\�I�Ɠ����悤�ȑ��肪�ł��Ȃ������̂��ƂĂ������������܂����B�ł����A�w�����ĉ��������搶���y�̂������ŁA�S����ʁA���x�X�g�^�C���ƁA�v�����ȏ�̌��ʂ��c�����Ƃ��ł��܂����B���N�x��Advanced Class�ł́A����̃~�X���������đS�����o��Ə�ʓ��܂�ڎw�������Ǝv���܂��B |
|
|
 |
 |
 |
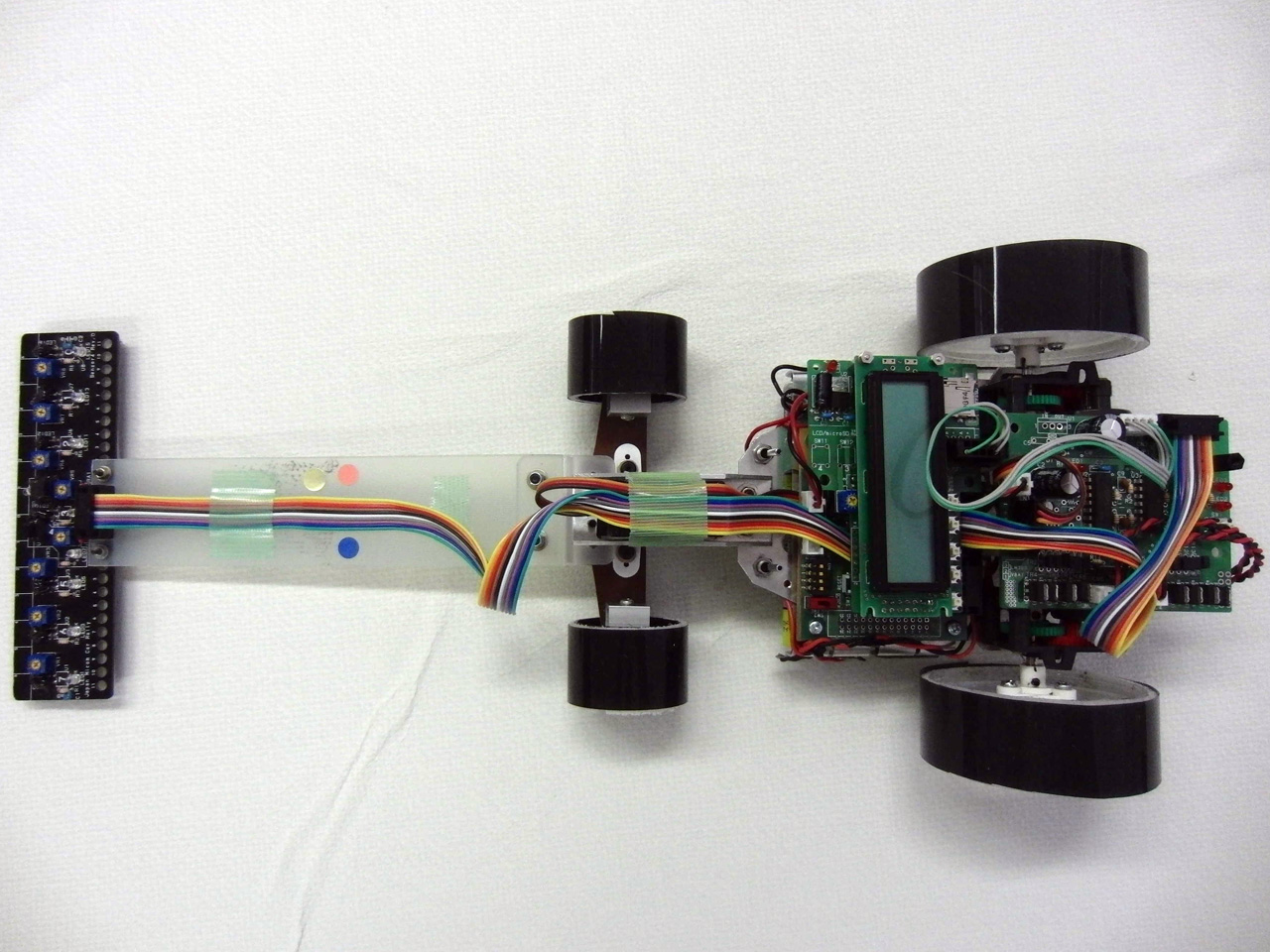
| �ォ�猩���Ƃ��� |
�����猩���Ƃ��� |
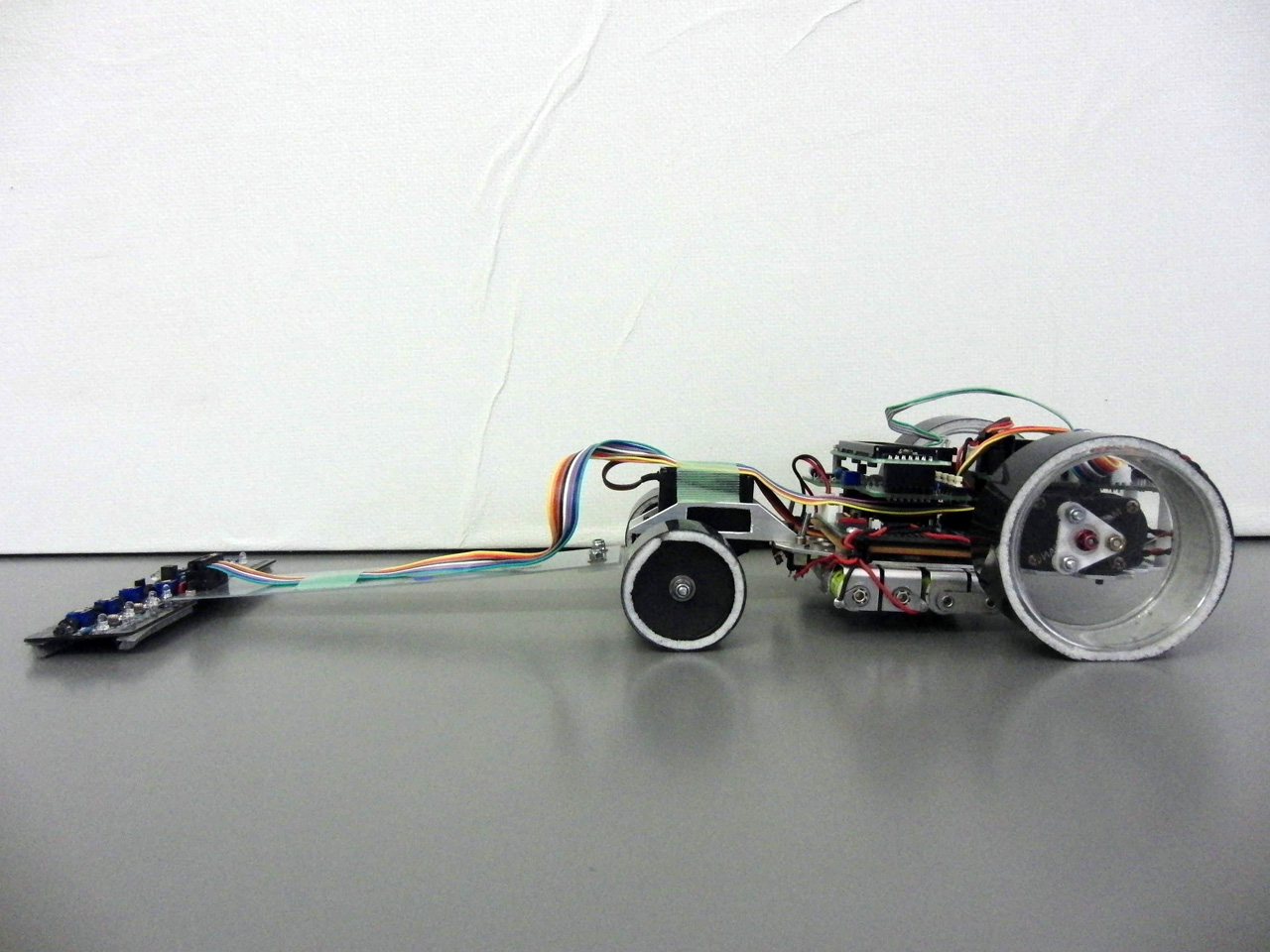
�߉����猩���Ƃ��� |
|
Basic Class�@��3��
|
�H�c���������Ėk�����w�Z�@�����@���N�@�u�C�����v
|
| ���@�e |
�ځ@�� |
| �����W |
�S���F450mm�A�S���F160mm�A�z�C�[���x�[�X�F165mm |
| �d��(�d�r����) |
600g |
| �d�r |
�}�C�R�����F�d�r4�{
���[�^���F�d�r4�{ |
| �쓮���[�^ |
��֍��E�Ɏw�胂�[�^1���g�p
�^�~���n�C�X�s�[�h�M���{�b�N�X�i�M����11.6:1) |
| �^�C���A�z�C�[�� |
�O�ցF35mm�@��ցF56mm
���W�R���z�C�[�����g�p���A�X�|���W���������� |
| �T�[�{ |
�n�C�e�b�N�� HS430BH |
�R�[�X���o
�Z���T |
�f�W�^���Z���T8�i�Z���T���Ver.5�j |
���̑���
�Z���T |
�X�^�[�g�o�[���o�Z���T |
| ���@�� |
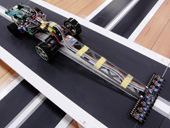
���C���V���[�V��A�Z���T�o�[�̑f�ނ��J�[�{���ɂ��āA�ԑ̂̌y�ʉ��ƍ������������Ă��܂��B�L�b�g�̃}�C�R���J�[���A�g�p����l�W�̖{���╔�i�������Ȃ��A�g�ݗ��Ă���e�i���X���e�Ղł��B�T�[�{�ւ̕��S���l���O�֕����̉��d�����炵�A�n���h���̐��ǂ����Ă��܂��B�܂��A�R�[�X�������ł������ǂݎ�邽�߂ɁA�Z���T�o�[�����Ă��܂��B |
| ��J�����_ |
�t���C�X�Ղ�p������Ƃ���J���܂������A���i�����J�ɉ��H�����̂ŁA���x�̍����}�V������邱�Ƃ��ł��܂����B�����R�[�X�ő��点��ƒE�ւ������A�O�ւƓ��ւ�PWM�̒����ɂ���J���܂����B���Ƀn�[�t���C���ɐݒu���ꂽ�d���S���̃|�[���ɐڐG���Ȃ��悤�ȃn���h���̐�p����ւƊO�ւ�PWM�̒�������������ł��B |
| ���z |
�����g�[�i�����g�i�߂�䐔��4��܂ł������̂ŁA�\�I�ʉ߂��ł���Ƃ͎v���܂���ł����B�v���O�������������āA1��ڂ��2��ڂŃ^�C�����k�߂邱�Ƃ��ł��܂������A�g�[�i�����g�ł̓^�C�����k�߂邱�Ƃ��ł����c�O�ł����B�ł��A3�ʂƂ������ʂɖ������Ă��܂��B�����܂ł���ꂽ�̂͐搶�A��y���̂��w���A��������̕��X�̂��x���̂��������Ǝv���܂��B�{���ɂ��肪�Ƃ��������܂����B���N�x��Advanced Class�őS�����ɏo�ꂵ�����ł��B |
|
|
 |
 |
 |
| �ォ�猩���Ƃ��� |
�����猩���Ƃ��� |
�߉����猩���Ƃ��� |
|