| ● |
本ページの内容は、上位入賞者の皆さんへアンケートを送り、ご回答いただいた内容を掲載しています。お忙しい中ご回答いただきました顧問の先生、選手の方々のご厚意に感謝申し上げます。 |
| ● |
学校や本人へ直接問い合わせることはしないようお願いします。 |
|
Advanced Class 優勝
 |
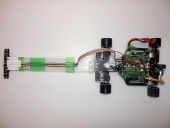
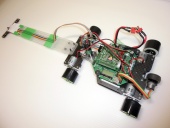
| 長野県飯田OIDE長姫高等学校 小池 魁舟 「極楽鳥花」 |
| 内 容 |
詳 細 |
| 長さ関係 |
全長:560mm、全幅:195mm、ホイールベース:170mm |
| 重量(電池込み) |
773g |
| 電池 |
EneloopLite 8本、またはNeoChamp 8本 |
| 駆動モータ |
前:1軸1個 後ろ:1軸1個輪
ギヤ比 60:8 |
| タイヤ、ホイール |
タイヤの直径:44mm
川田模型 ミニ用ワイドホイールを使用 |
| サーボ |
maxon製 RE-max21
ギヤ比 66.7:1 |
コース検出
センサ |
デジタルセンサ5個、アナログセンサ2個 (アナログセンサ基板 TypeS Ver.2を使用) |
その他の
センサ |
坂道検出センサ、エンコーダ、角度検出用ポテンショメータ |
| 特 徴 |
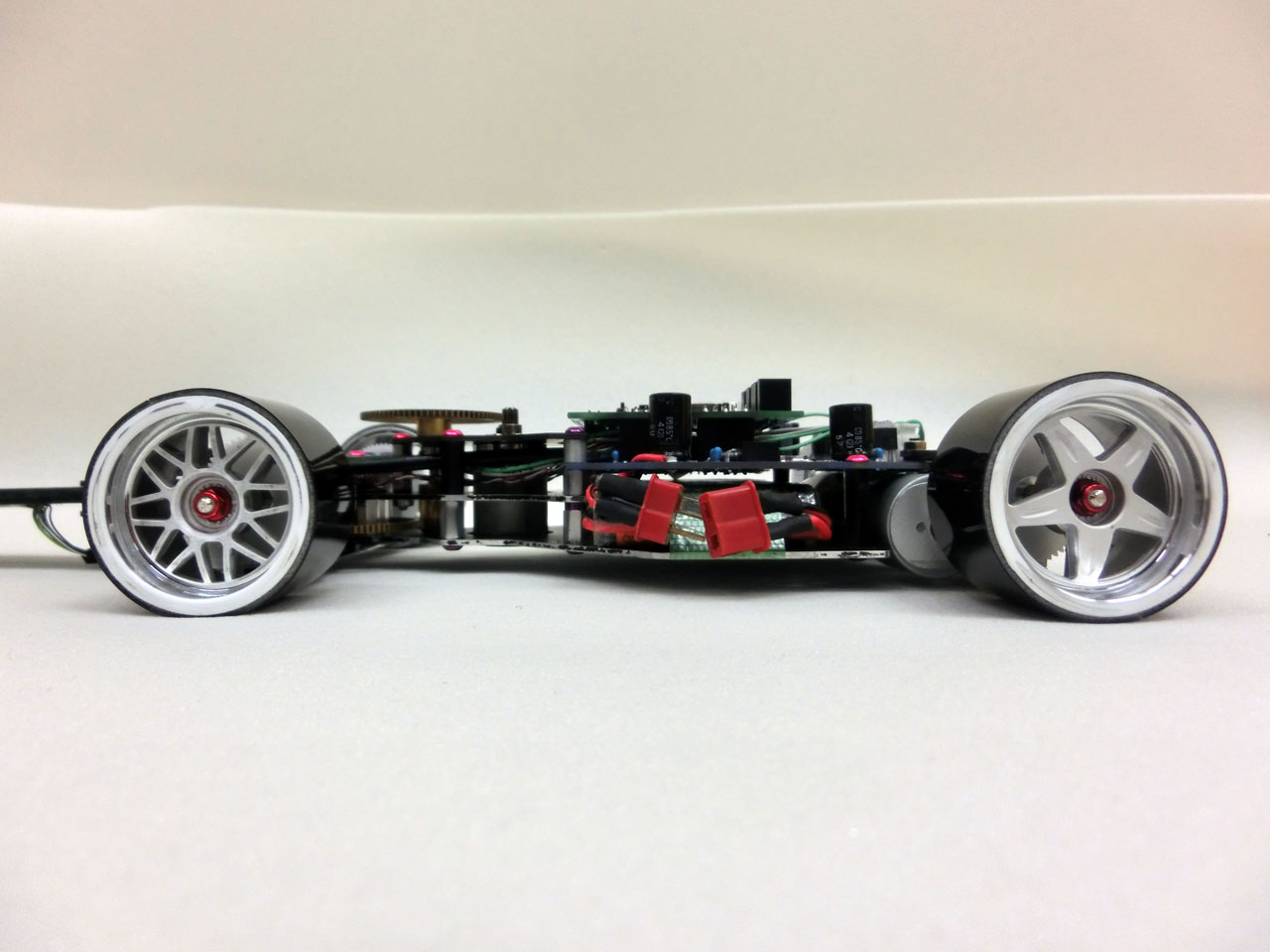
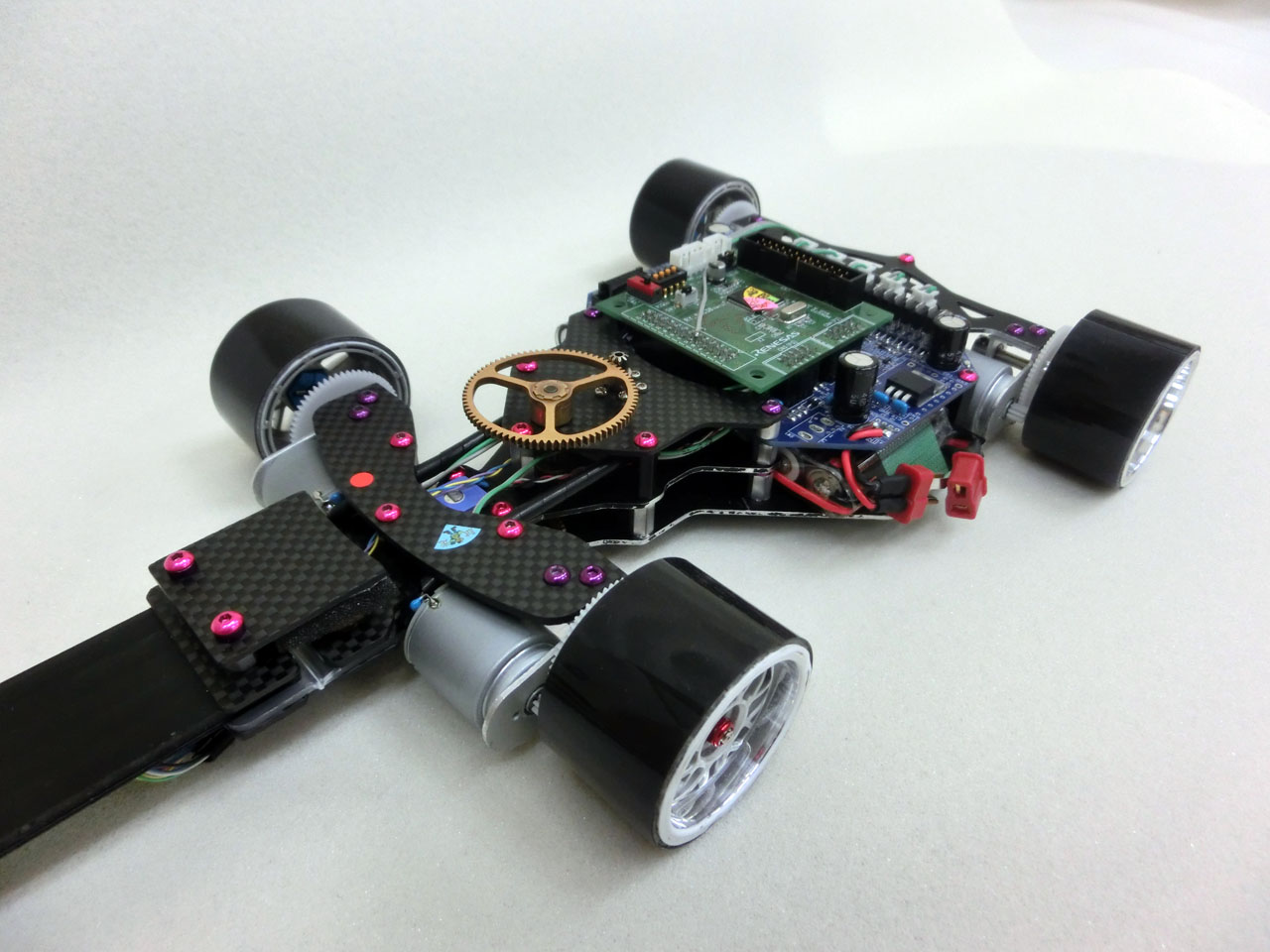
高剛性、低重心をコンセプトに車体を製作しました。フロントにキャンバー角を付けスクラブを減らすことで、カーブ進入時の操舵力を軽くしています。センサーバーの押さえを無くして、前輪のグリップ力を高めました。 |
| 苦労した点 |
使用しているタイヤが気温や湿度の変化に弱いため、大会会場に合うと思われる組み合わせを何通りも試し、その場その場でベストな走りができるようにするのが大変でした。指定モータの個体差により車体が曲がった状態で走る症状に悩まされました。 |
| 感想 |
決勝トーナメントを勝ち上がるためには完走が絶対条件であるため、どんなコースレイアウトでも必ず完走できるように調整を重ねてきました。最後に優勝という結果を残すことができて大変嬉しく思います。3年間この活動に取り組む中で、様々な経験をして多くのことを学びました。大会運営に関わられた皆様や先生方、本当にありがとうございました。 |
|
 |
 |
 |
 |
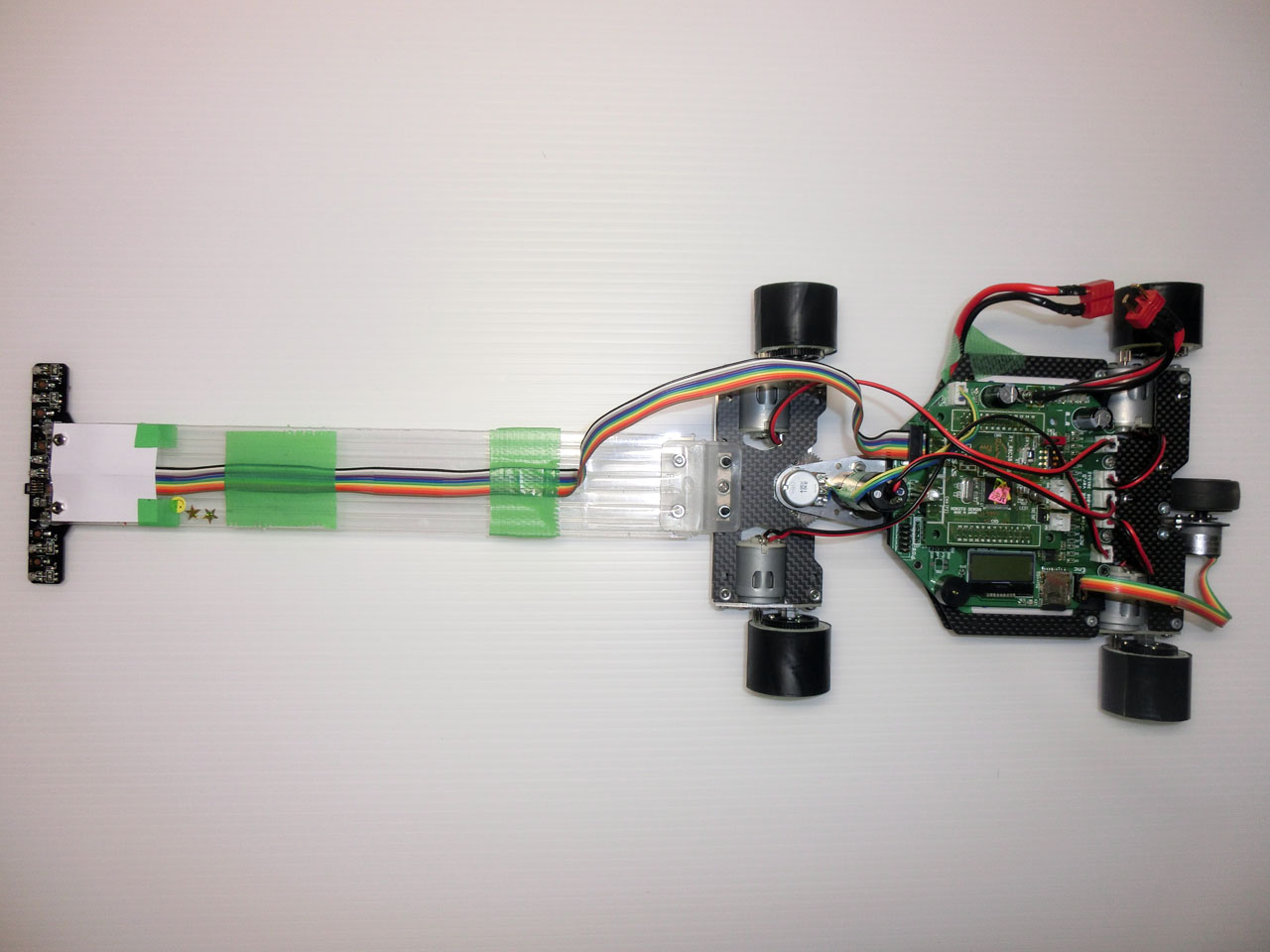
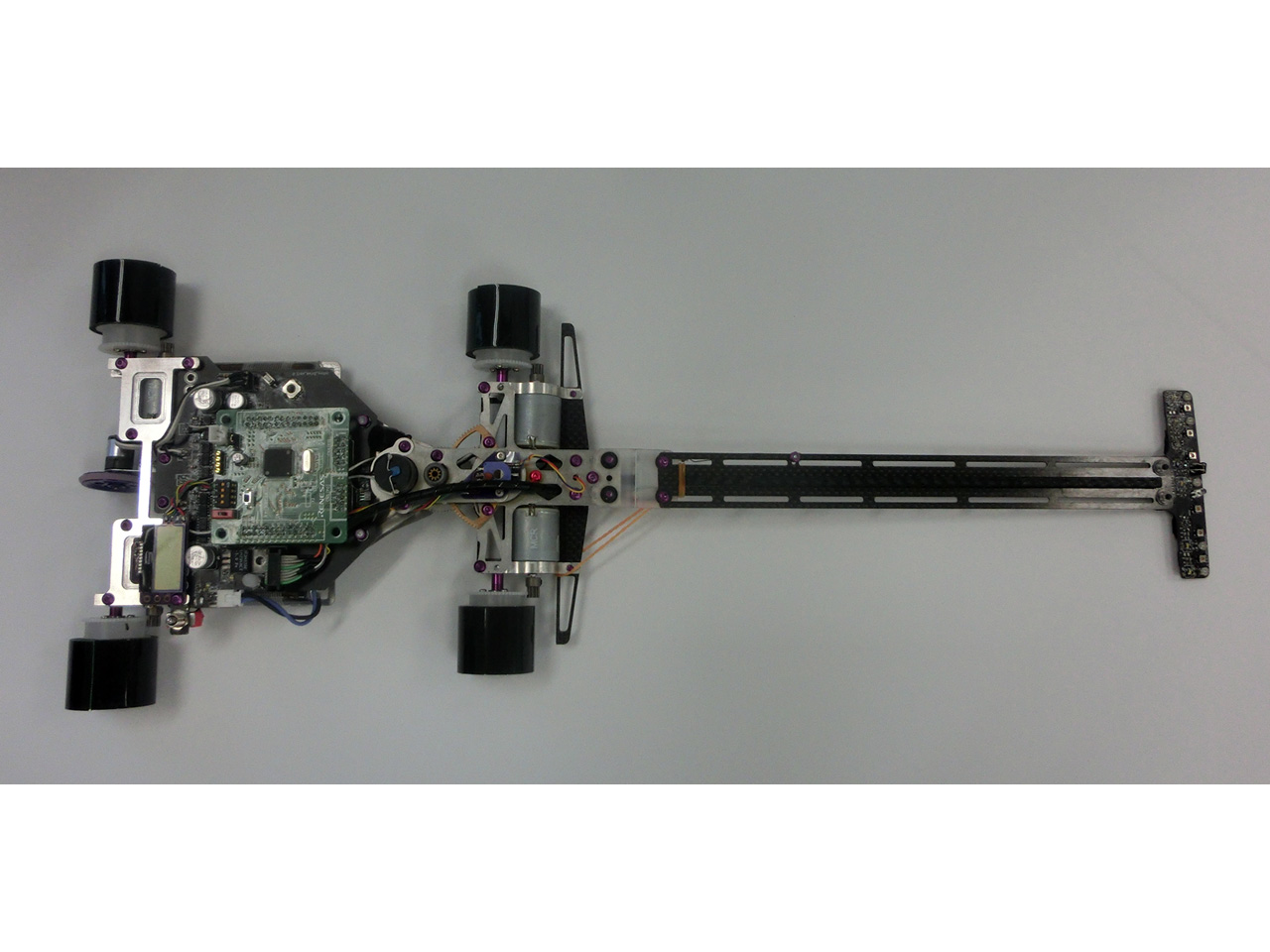
| 上から見たところ |
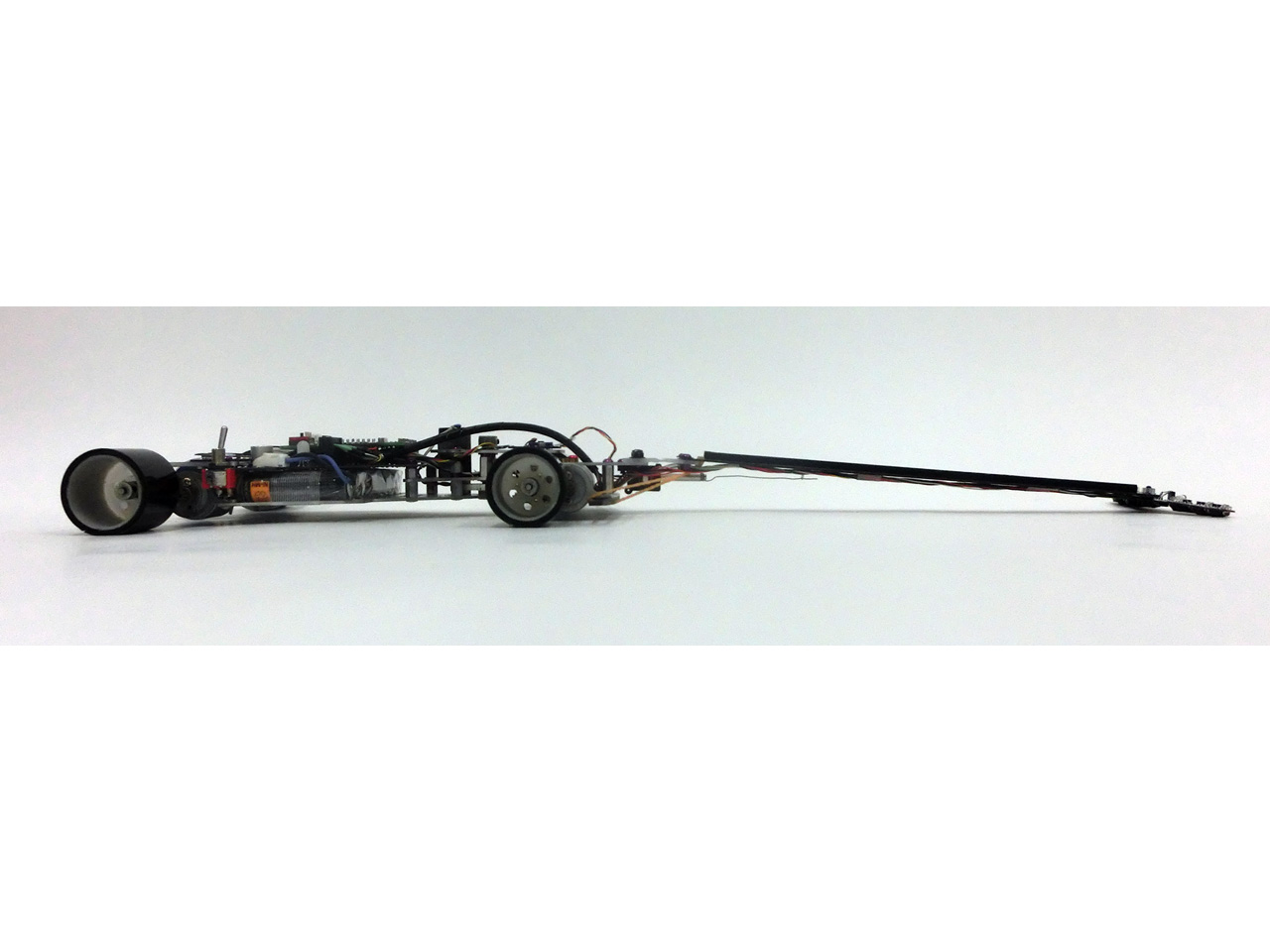
横から見たところ |
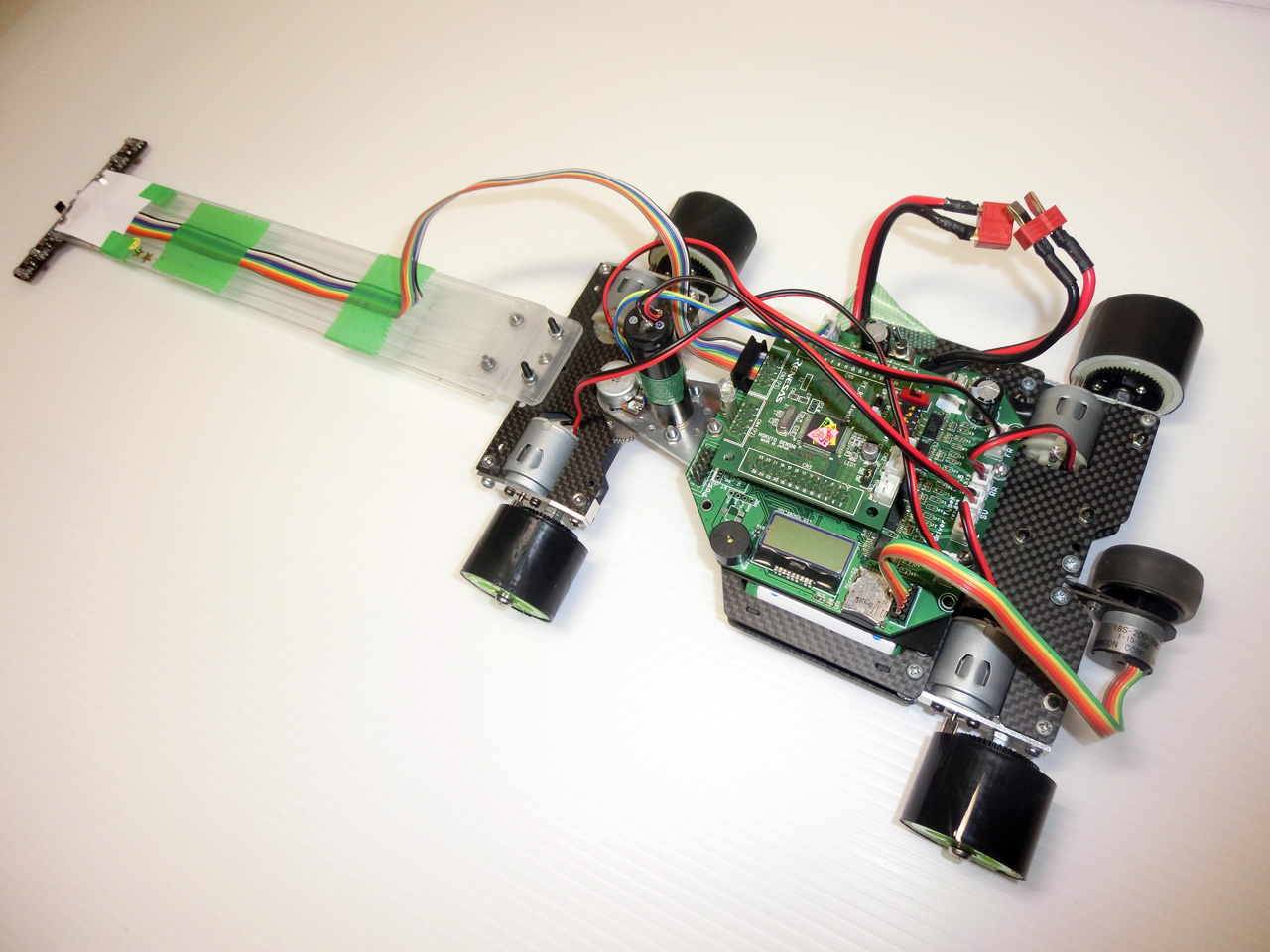
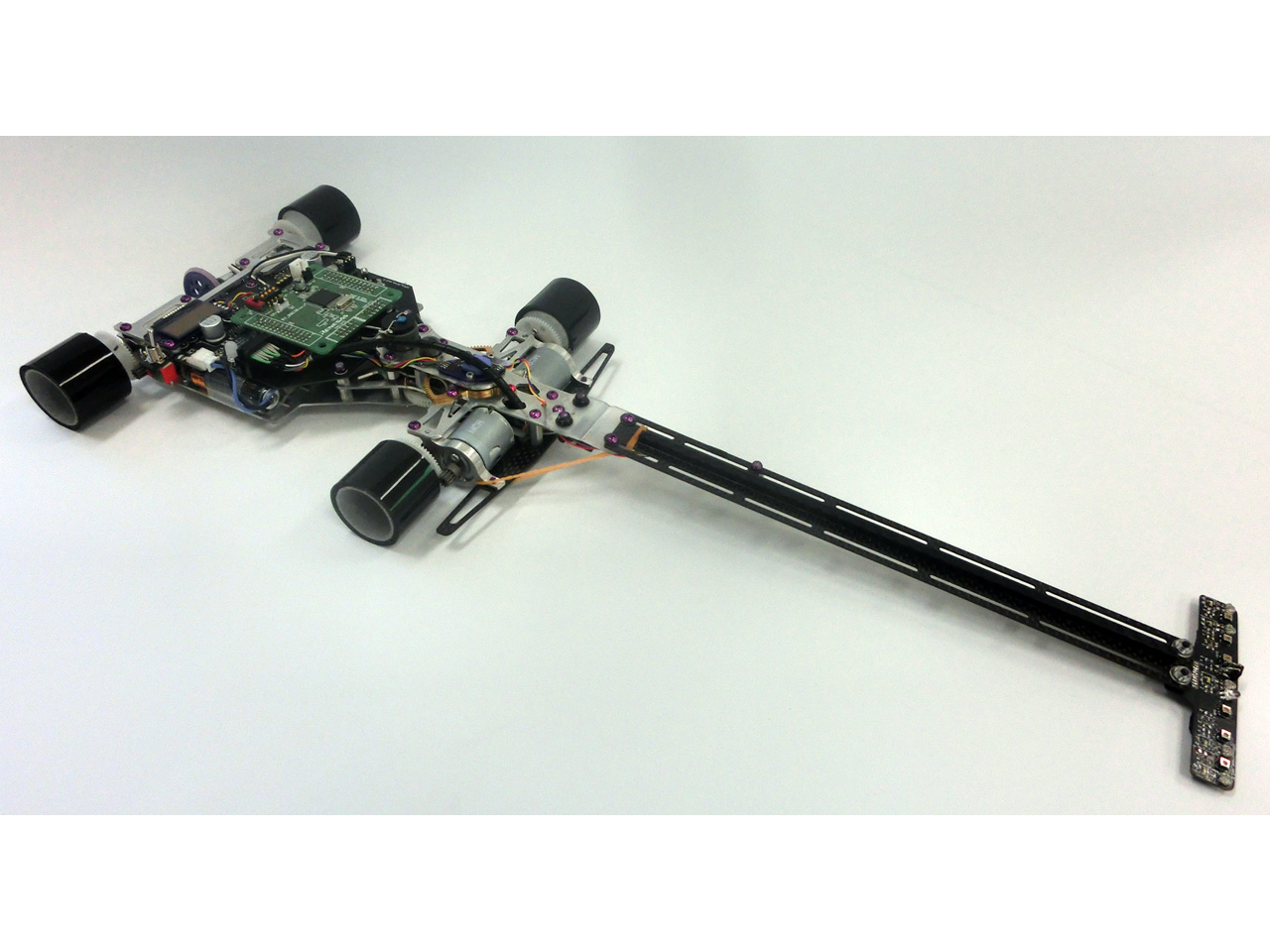
斜め横から見たところ |
|
Advanced Class 準優勝
|
| 熊本県立熊本工業高等学校 田代 健一 「Guessy」 |
| 内 容 |
詳 細 |
| 長さ関係 |
全長:555mm 全幅:203mm ホイールベース:170mm |
| 重量(電池込み) |
809.5g |
| 電池 |
eneloop 8本 |
| 駆動モータ |
前:1軸1個 後ろ:1軸1個輪
ギヤ比:50:8 |
| タイヤ、ホイール |
直径:37mm
フィルムケースにスポンジ、養生テープ、シリコンシートの順で貼る。 |
| サーボ |
maxon製 RE16(118682)+gear GP16A(110322) |
コース検出
センサ |
デジタルセンサ 5個、アナログセンサ 2個 |
その他の
センサ |
ジャイロセンサ 1個、ゲートセンサ 1個、エンコーダ 1個 |
| 特 徴 |
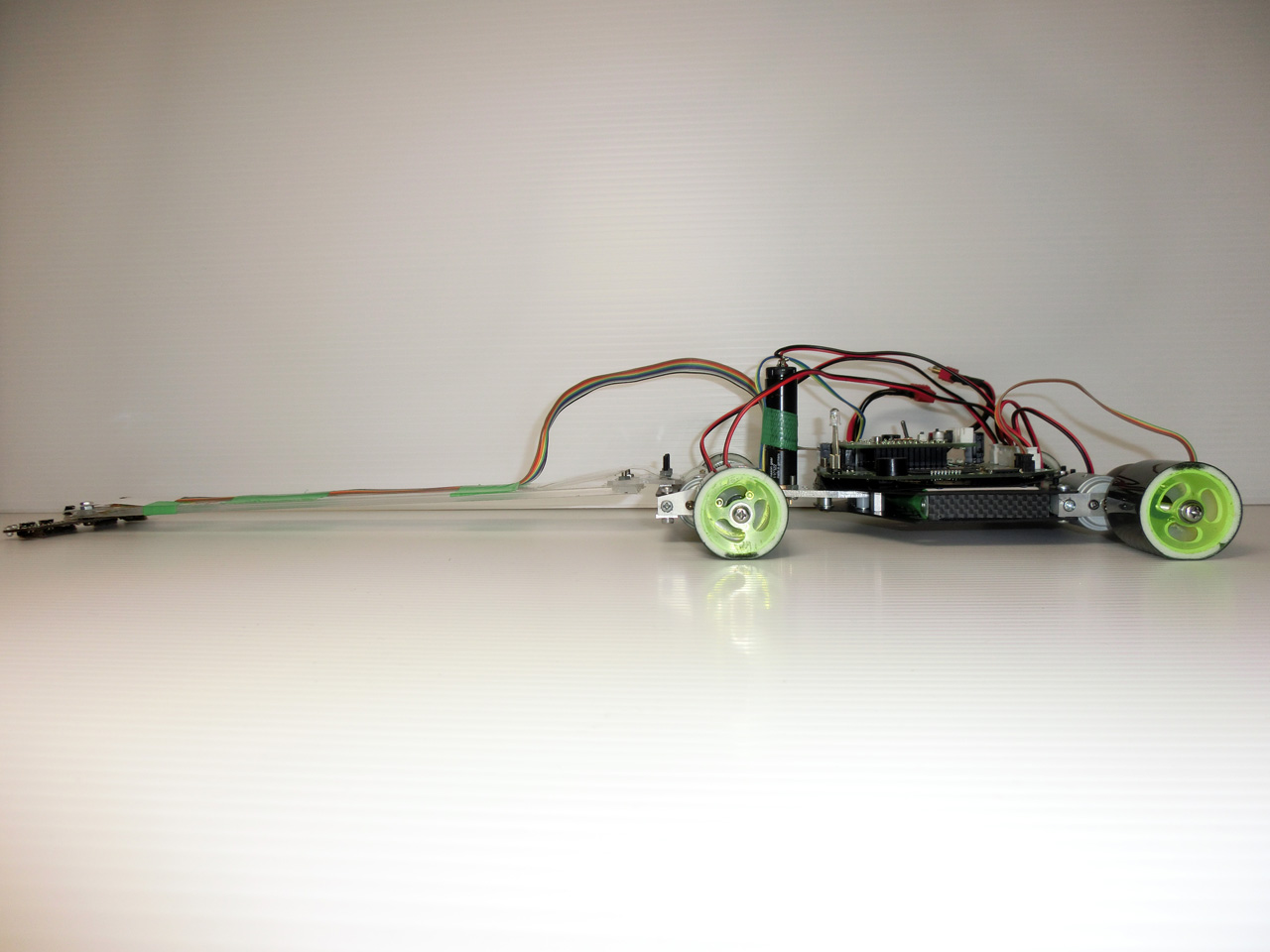
低重心、高剛性、車体のバランスを目標に製作しました。カーボンのシャーシ2枚で電池をがっちりと挟むことで剛性を上げ、軽さも追求しました。また、カーボンとジュラルミンを使い分けることで、車体のバランスが良くなりました。 |
| 苦労した点 |
最初は軽量化も考え製作していましたが、コーナーで思うようにグリップせず、車体のバランスを考えパーツを追加したりするなどして、結果的には地区大会の時より重くなってしまいました。また、全国大会直前にレーンチェンジのアルゴリズムを何度も見直して、安定性を高めるのに苦労しました。 |
| 感想 |
今回は予選から決勝トーナメントまで安定した走りができて良かったです。決勝戦ではタイムで負けてしまったので来年は速く安定した車体を目指して製作していきたいです。応援してくださった皆様、本当にありがとうございました。 |
|
|
 |
 |
 |
| 上から見たところ |
横から見たところ |
斜め横から見たところ |
|
Advanced Class 第3位
|
| 岐阜県立可児工業高等学校 伊藤 拓夢 「i-Mu」 |
| 内 容 |
詳 細 |
| 長さ関係 |
全長:525mm 全幅:200mm ホイールベース:170mm |
| 重量(電池込み) |
580g |
| 電池 |
TAMIYA NEO CHAMP 8本 |
| 駆動モータ |
前モータ:1軸1個、後ろ:1軸1個
ギヤ比 54:10 |
| タイヤ、ホイール |
タイヤの直径:前輪34mm 後輪36mm
ポリプロピレン樹脂棒から削り出し |
| サーボ |
maxon製 RE-max17
ギヤ比 75:1 |
コース検出
センサ |
アナログセンサ2個、デジタルセンサ5個 |
その他の
センサ |
スタートバーセンサー・角度検出用センサ・坂道検出用センサ・エンコーダ |
| 特 徴 |
「軽量・低重心」にこだわりマシンを製作しました。また、試行錯誤の結果フロントのトレッドを少し広げることにより、全体的に走りが安定するようになりました。 |
| 苦労した点 |
コースアウトした際、マシンが壊れてしまうので、コースの管理や気温によるタイヤのスポンジの硬化等に合わせた、各パラメータの調整・設定に苦労しました。 |
| 感想 |
今回全国大会3位という結果でした。この結果は、自分だけの力ではなく、顧問の先生、部活の仲間、家族など、様々な方の支えがあったからこそ残せた結果だと思います。感謝しています。今後は、今大会の課題を修正し、全国大会優勝目指してチーム一丸となり、日々努力していきたいと思います。 |
|
|
 |
 |
 |
| 上から見たところ |
横から見たところ |
斜め横から見たところ |
|