| �� |
�{�y�[�W�̓��e�́A��ʓ��҂̊F����փA���P�[�g�𑗂�A���������������e���f�ڂ��Ă��܂��B���Z�����������������܂����ږ�̐搶�A�I��̕��X�̂����ӂɊ��Ӑ\���グ�܂��B |
| �� |
�w�Z��{�l�֒��ږ₢���킹�邱�Ƃ͂��Ȃ��悤���肢���܂��B |
|
Basic Class�@�D��
 |
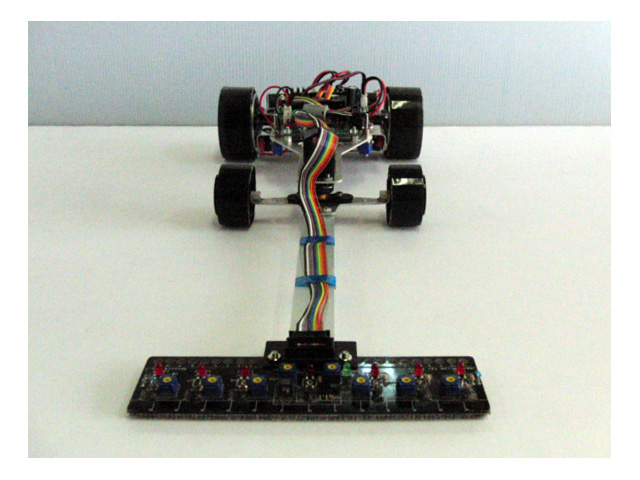
| ���R�����ʖ���썂���w�Z�@�c��@�G���@�u����l�v |
| ���@�e |
�ځ@�� |
| �����W |
�S���F460�o�A�S���F160�o�@�z�C�[���x�[�X�F165�o |
| �d�� |
490g (�d�r����) |
| �d�r |
�}�C�R�����Feneloop lite 4�{
���[�^���Feneloop lite 4�{ |
| �쓮���[�^ |
��֍��E�Ɏw�胂�[�^1���g�p
�^�~���n�C�X�s�[�h�M���{�b�N�X�i�M����11.6:1) |
| �^�C���A�z�C�[�� |
�O�ցF���a45mm�@��ցF���a60mm
�s�̃��W�R���z�C�[�������܂����B |
| �T�[�{ |
ES-519 |
�R�[�X���o
�Z���T |
�f�W�^��7��(�Z���T���Ver.4) |
���̑���
�Z���T |
�X�^�[�g�o�[���o�Z���T |
| ���@�� |
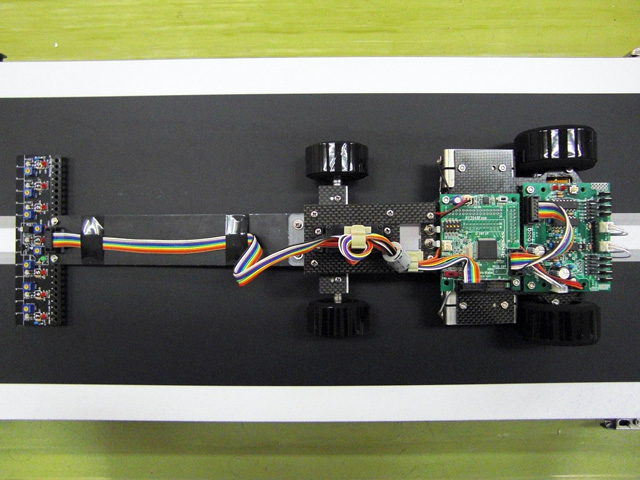
�V���[�V�ɃJ�[�{�����g�p���A�ԑ̂̌y�ʉ��ƍ������������܂����B�g�p����l�W�̖{�������Ȃ����A�ڒ��܂�p���Čy�ʉ��ɂ��܂����B���炩�ȑ��s�ɂȂ�悤�ɁA���ɎԐ��ύX���̃v���O���~���O�ł́A�Z���T�̌��o��Ԃɍ��킹�ăn���h���̐�p���ׂ��������������Ƃɂ��A������x�̑����ő��s�ł���悤�ɂȂ�܂����B |
| ��J�����_ |
�^�C�����X���Ȃ��悤�Ȋ��炩�ȑ���ɂ��邽�߂ɁA���ւƊO�ւ�PWM�̒����A�Z���T�A�[���̒����ƃT�[�{�̐�p�̒����A�z�C���x�[�X�ƃg���b�h�̒����A�^�C���̕��̒����A�d�r�̎�ނɂ��������ȂǁA�}�b�`���O��������܂łɉ��x�����x����J���܂����B |
| ���z |
�������ꂭ�炢���Ȃ��Ďv�����A�}�V���̒����ɉ���������Ȃ����c�����Ƃ��́A�����Ȃ�̗��_�ɔ[���������܂Ō������܂����B�ŏI�I�ɂ͑S�����̎����ł������̌�̃J�[�u�̐�Ԃ��ŃR�[�X�A�E�g�ɂȂ肻���ȕ������������̂ŁA�J�[�u�̃X�s�[�h�𗎂Ƃ��Ĉ��葖�s�����悤���A����Ƃ��w�Z�ł͊������Ă����̂ł��̂܂܂ɂ��Ă��������Ɩ�x���܂ŔY�݂܂����B�������A���ʂƂ��ăR�[�X�A�E�g��������I���Ȃ̂ŁA���葖�s��I�����܂����B�O���̎����ł����䂩�����}�V�����������̂ŁA�܂����D���ł���Ƃ͎v���Ă��܂���ł����B�������A���ʂƂ��đS�����Ƃ�������ŗD�����邱�Ƃ��ł������Ƃ͖{���Ɋ����������ł��B�}�C�R���J�[�͉����[�����Z���Ɖ��߂Ċ����܂����B�������ĉ��������F����A�{���ɂ��肪�Ƃ��������܂����B |
|
 |
 |
 |
 |
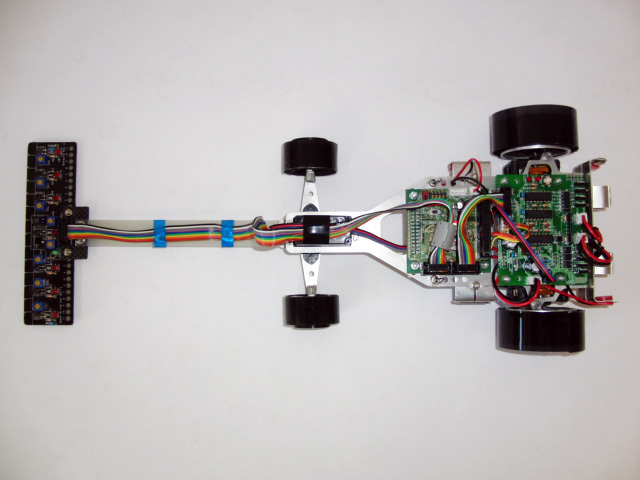
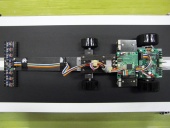
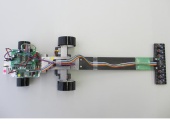
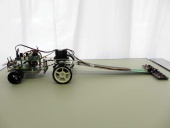
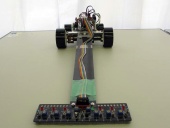
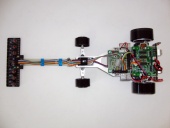
| �ォ�猩���Ƃ��� |
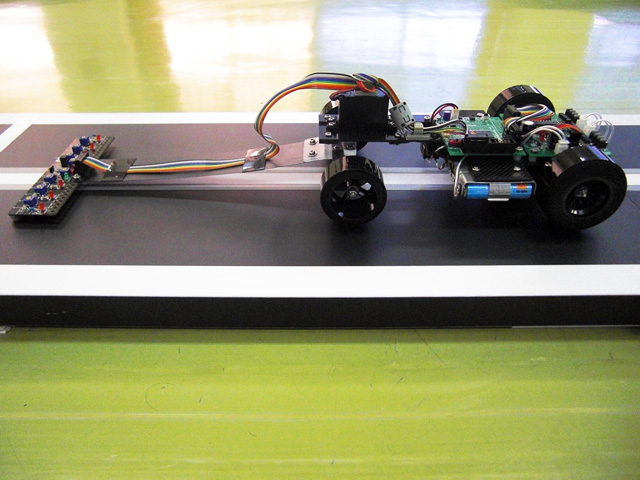
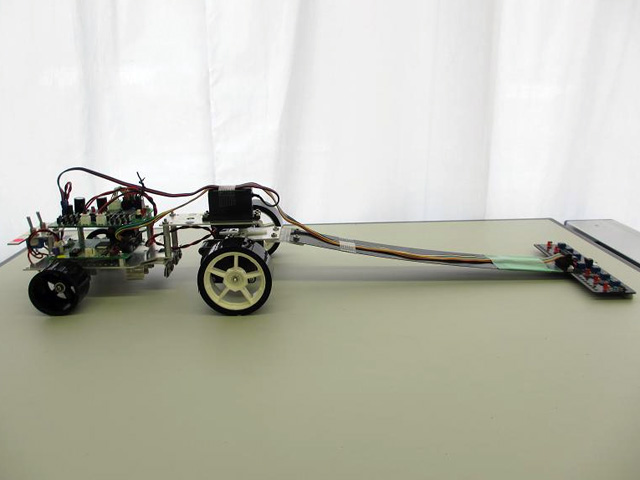
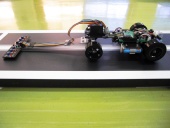
�����猩���Ƃ��� |
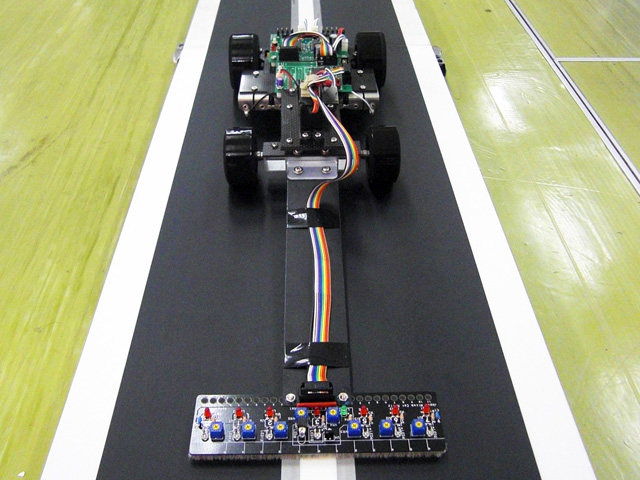
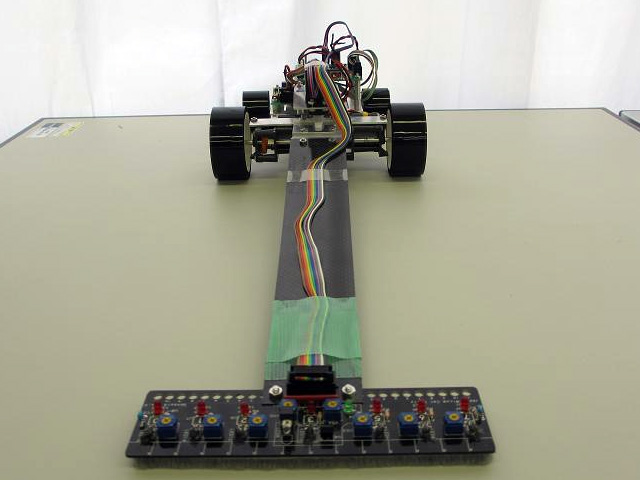
���ʂ��猩���Ƃ��� |
|
Basic Class�@���D�� |
| ������������H�ƍ����w�Z�@�V���@�t�P�@�u���C���X�y�V�����v |
| ���@�e |
�ځ@�� |
| �����W |
�S���F550mm�A�S���F170mm�A�z�C�[���x�[�X�F170mm |
| �d�� |
700g(�d�r�܂�) |
| �d�r |
�}�C�R�����Feneloop lite 4�{
���[�^���Feneloop lite 4�{ |
| �쓮���[�^ |
�O�֍��E�Ɏw�胂�[�^1���g�p
�^�~���n�C�X�s�[�h�M���{�b�N�X�i�M����11.6:1) |
| �^�C���A�z�C�[�� |
�s�̃��W�R���z�C�[���̃X�|�[�N�������ꕔ�������
�O�փ^�C�����a�F60mm�@��փ^�C�����a�F42mm |
| �T�[�{ |
SRM-102Z |
�R�[�X���o
�Z���T |
�f�W�^���Z���T7�i�Z���T���Ver.4�j |
���̑���
�Z���T |
�X�^�[�g�o�[���o�Z���T |
| ���@�� |
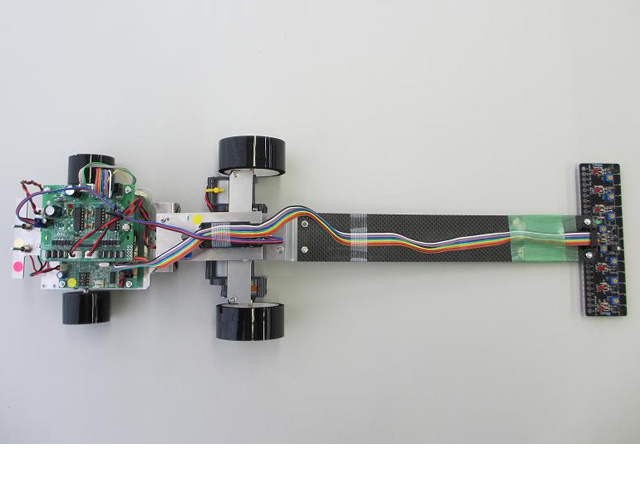
�J�[�u�֓˓������Ƃ��̔����𑁂����S�̓I�Ɉ��肵�����s���ł���悤�ɁA�O�쓮�ŃZ���T�o�[�����܂����B�܂��A�d�r�{�b�N�X�̈ʒu���ł��邾���^�ɂȂ�悤�ɂ��ċ@�̂̏d�ʃo�����X�𐮂��܂����B |
| ��J�����_ |
���肵�����s���ł���悤�ɑ��O�܂Ŏԑ̂̈ʒu��ς��܂����B�܂��A�≺�̃J�[�u��N�����N�ɓ���u���[�L�ʂ�����̂���ςł����B1�点�邲�ƂɃv���O���������ߒ����A�ԑ̂ɍ������p�x��PWM��T���̂Ɏ��Ԃ�������܂����B |
| ���z |
���܂Ńv���O������@�̂̌`��ɂ�鑖�s�̓���������Ă����̂ŁA���ꂪ�S�����Ŕ����ł��ėǂ������ł��B�D���ł��Ȃ������������͂���܂����A��x���R�[�X�A�E�g�����ɑ��点�邱�Ƃ��ł��Ċ����������ł��B���̏��D���͋����Ă����������搶�⋦�͂��Ă��ꂽ�����A�܂��������Ă����������w�Z�̕��X�̂��������Ǝv���Ă��܂��B�S���犴�ӂ��Ă��܂��B���N��Basic Class�Ƃ͈ႢAdvanced Class�ɏo�ꂷ��̂Ŋ撣���Ă��������ł��B |
|
|
 |
 |
 |
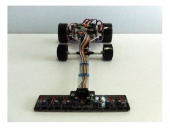
| �ォ�猩���Ƃ��� |
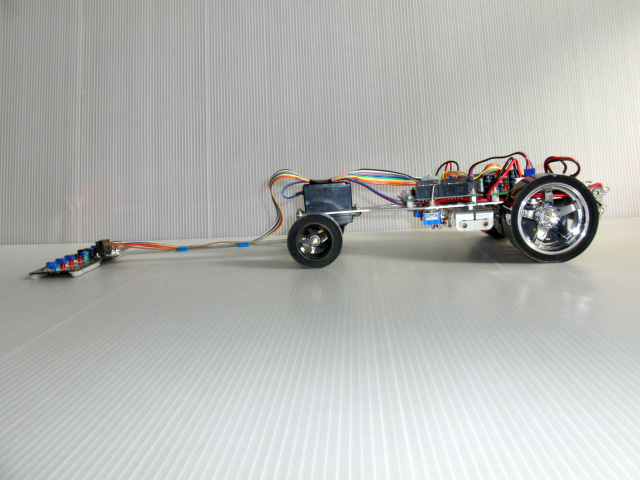
�����猩���Ƃ��� |
���ʂ��猩���Ƃ��� |
|
Basic Class�@��3��
|
�L�������L���H�ƍ����w�Z�@�����@���@�u�������v
|
| ���@�e |
�ځ@�� |
| �����W |
�S���F440mm�A�S���F170mm�A�z�C�[���x�[�X�F170mm |
| �d�� |
420g(�d�r����) |
| �d�r |
�}�C�R�����F�j�b�P�����f�d�r4�{�@���[�^���F�A���J���d�r4�{ |
| �쓮���[�^ |
��֍��E�Ɏw�胂�[�^1���g�p
�^�~���n�C�X�s�[�h�M���{�b�N�X�i�M����11.6:1) |
| �^�C���A�z�C�[�� |
�s�̃��W�R���p�z�C�[���ɃX�|���W�������Ďg�p
�O�ցF40mm�@��ցF63mm |
| �T�[�{ |
SRM-102Z |
�R�[�X���o
�Z���T |
�f�W�^���Z���T7�i�Z���T���Ver.4�j |
���̑���
�Z���T |
�X�^�[�g�o�[���o�Z���T |
| ���@�� |
�ꖇ�̃V���[�V�[�Ƀ}�C�R����[�^�h���C�u��Ȃǂ�z�u���邱�ƂŁA�g�ݗ��Ă���e�i���X���e�ՂɂȂ�y�ʉ��ɂ��Ȃ��Ă���B�d�r���o���邾����ɓ��ڂ��邱�ƂŃt�����g�̉��d�����炵�A�n���h���̐��ǂ������B |
| ��J�����_ |
�}�V���̃X�s�[�h�������Ĉ��肵�����s���o����悤�ɂ���̂ɑ�ς������B�܂��A���x�������Ȃ��悤�ɂ��Ďԑ̂̌y�ʉ��������B�N�����N�A���[���`�F���W�œ˂����܂Ȃ��悤�ɉ��x�����s�����v���O�����̉��ǂ������B |
| ���z |
���߂Ēn����E�S�����Əo�ꂵ�A3�N�Ԃ̍Ō�ɂ����v���o���o���܂����B���ɑS�����ł͗\�I�̏��ʂ�14�ʂ������̂Ō����g�[�i�����g�ł̏�ʓ��܂͓���Ǝv���܂������A3�ʂɓ��܂ł��ĂƂĂ������������B |
|
|
 |
 |
 |
| �ォ�猩���Ƃ��� |
�����猩���Ƃ��� |
���ʂ��猩���Ƃ��� |
|