| �� |
�{�y�[�W�̓��e�́A��ʓ��҂̊F����փA���P�[�g�𑗂�A���������������e���f�ڂ��Ă��܂��B���Z�����������������܂����ږ�̐搶�A�I��̕��X�̂����ӂɊ��Ӑ\���グ�܂��B |
| �� |
�w�Z��{�l�֒��ږ₢���킹�邱�Ƃ͂��Ȃ��悤���肢���܂��B |
|
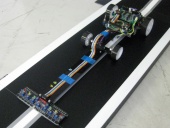
Basic Class�@�D��
 |
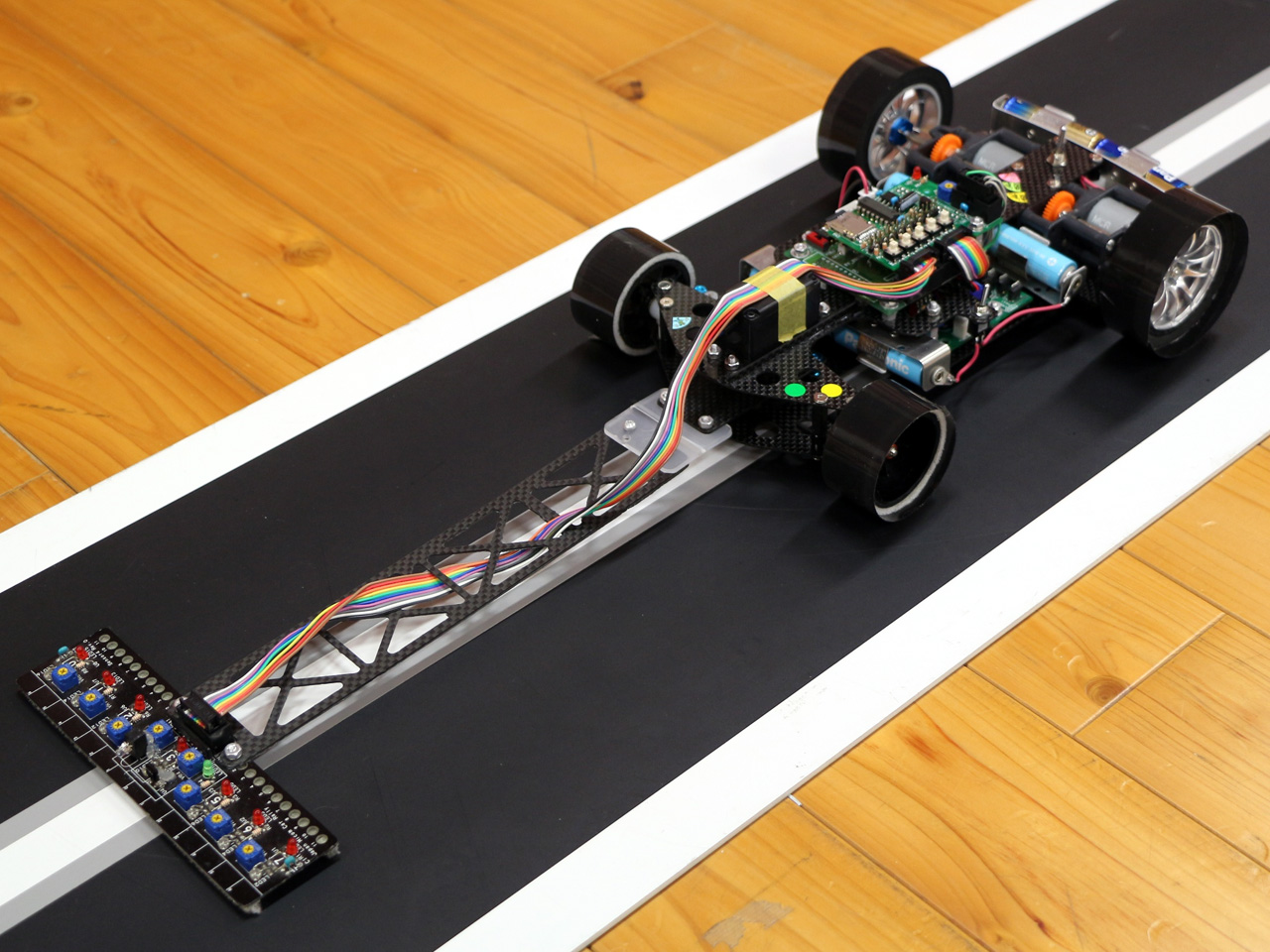
| ���Q�������R�H�ƍ����w�Z�@���@�@�����@�u�I�����W���S���v |
| ���@�e |
�ځ@�� |
| �����W |
�S���F520�o�A�S���F190�o�@�z�C�[���x�[�X�F165�o |
| �d��(�d�r����) |
640g |
| �d�r |
�}�C�R�����Feneloop lite 4�{
���[�^���F�A���J��EVOLTA 4�{ |
| �쓮���[�^ |
��֍��E�Ɏw�胂�[�^1���g�p
�^�~���n�C�X�s�[�h�M���{�b�N�X�i�M����11.6:1) |
| �^�C���A�z�C�[�� |
�O�ցF���a48mm�@��ցF���a65mm
�s�̃��W�R���p�z�C�[�����g�p���A�X�|���W�������Ă��� |
| �T�[�{ |
�T�����F�r�q�l�|�P�O�Q�y |
�R�[�X���o
�Z���T |
�f�W�^��7��(�Z���T���Ver.4) |
���̑���
�Z���T |
�X�^�[�g�o�[���o�Z���T |
| ���@�� |
��쓮�ŁA�X�s�[�h���o���Ȃ�����R�[�X�ɉ����ď_��ɑΉ��ł���}�V����ڎw���܂����B�A�b�J�[�}���������̗p���A���ׂĂ̕��i���l�W��X�y�[�T�łȂ���̍\���Ƃ��邱�ƂŁA�J�[�u��u���[�L�̎��ɂ��u���̏��Ȃ��}�V���ɂȂ��Ă��܂��B���̂��߁A���낢��ȏ�ʂň��肵�ăX�s�[�h���o�����Ƃ��ł��܂��B |
| ��J�����_ |
�^�C���̃X�|���W�Ⓖ�a��ύX���邽�тɁA�������s�����Ƃ���ςł����B���ɁA���x���オ�������Ƃɂ��N�����N��[���`�F���W�Ő��䂪�ǂ����Ȃ��Ȃ��J���܂����B�܂��A��̍\���ɂ������ƂŃ����e�i���X������Ȃ�A�}�V���̑g�ݗ��Ă�d�ʃo�����X�̒����ɋ�J���܂����B |
| ���z |
�O���̎����ł́A�R�[�X�ɓ������Ă���Ɩ��̖��邳���ꏊ�ɂ��Ⴄ�̂Ŗ��������ł���̂��s���ł����B�܂��A��s�@�ŗA�������e���Ȃ̂��A�T�[�{�̓��삪�s����ł����̂悤�ɃX���[�Y�ɃJ�[�u�����s�ł��Ȃ������̂��C������ł����B�\�I�ł́A2��Ƃ��������s���邱�Ƃ��ł��܂������A1�ʂ̑I��̃^�C����0.3�b�̍����������̂ŁA�����g�[�i�����g�܂ł̊ԂɃJ�[�u�̏o�͂�p�x���������^�C�����k�߂悤�Ɠw�͂��܂����B�����g�[�i�����g�ł́A�����܂�4�l��3�l���l���n���\�ŁA���������Ȃ��Ƃ����C��������苭���Ȃ�܂����B�܂��A�p�����[�^�̕ύX�ɂ��^�C�����k�߂邱�Ƃ��ł��A������ł�100����3�b���Ƃ������������邱�Ƃ��ł��A�ƂĂ��ǂ��v���o�ɂȂ�܂����B������A�n����E�S�������x���Ă������������X�⎄���x���Ă������������X�̂��������Ǝv���܂��B�{���ɂ��肪�Ƃ��������܂����B |
|
 |
 |
 |
 |
| �ォ�猩���Ƃ��� |
�����猩���Ƃ��� |
�߉����猩���Ƃ��� |
|
Basic Class�@���D�� |
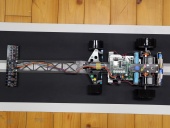
| �H�c���������Ėk�����w�Z�@�����q�m�@�u�t���_���v |
| ���@�e |
�ځ@�� |
| �����W |
�S���F455mm�A�S���F170mm�A�z�C�[���x�[�X�F165mm |
| �d��(�d�r����) |
590g |
| �d�r |
�}�C�R�����Feneloop lite 4�{
���[�^���F�A���J��EVOLTA 4�{ |
| �쓮���[�^ |
��֍��E�Ɏw�胂�[�^1���g�p
�^�~���n�C�X�s�[�h�M���{�b�N�X�i�M����11.6:1) |
| �^�C���A�z�C�[�� |
���W�R���z�C�[�����g�p���A�X�|���W����������
�O�փ^�C�����a�F35mm�@��փ^�C�����a�F56mm |
| �T�[�{ |
�n�C�e�b�N�� HS430BH |
�R�[�X���o
�Z���T |
�f�W�^���Z���T8�i�Z���T���Ver.5�j |
���̑���
�Z���T |
�X�^�[�g�o�[���o�Z���T |
| ���@�� |
���C���V���[�V��Z���T�o�[�̑f�ނ��J�[�{���ɂ��āA�ԑ̂̌y�ʉ��ƍ������������Ă��܂��B�g�p����l�W�̖{���╔�i�������Ȃ��Ȃ����A��N�̐�y�̃}�V�����y���Ȃ�悤�v���܂����B�܂��A�R�[�X�������ł������ǂݎ�邽�߂ɁA�Z���T�[�o�[�����Ă��܂��B |
| ��J�����_ |
�N�����N�̃u���[�L������̂ɋ�J���܂����B�ǂ̂悤�ȏł��N���A�ł���悤�u���[�L��X�s�[�h�̒��������܂����B�܂��A�^�C���̃T�C�Y��d�r�̎�ނ�ς��邾���ő����������Ă���̂ŁA���ꂼ��̃p�^�[���Œ�������̂���ςł����B |
| ���z |
���̐��삵���}�C�R���J�[�́A�y�����d�����X�s�[�h���o����悤�ɍH�v���Ă��܂��B�S�����o���O���܂ŁA���������܂����B��y�����S�����Ŗ��N���ʂ��c���Ă���Ƃ����v���b�V���[������A�ƂĂ��ْ����܂������A�v���O����������X�^�[�g���O�܂Ń}�V���̐��������āA�ǂ����ʂ��c�����Ƃ��ł��܂����B����̂��̌��ʂ́A������l�̗͂ł͂Ȃ��A�搶�A��y���A�T�|�[�g���Ă��ꂽ���Ԃ̂������ł��B�{���ɂ��肪�Ƃ��������܂����B���N�x���撣��܂��B |
|
|
 |
 |
 |
| �ォ�猩���Ƃ��� |
�����猩���Ƃ��� |
�߉����猩���Ƃ��� |
|
Basic Class�@��3��
|
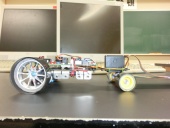
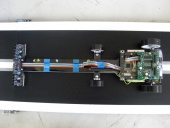
���Q�����V���l�H�ƍ����w�Z�@�䉺�@�q�@�u�����[�v
|
| ���@�e |
�ځ@�� |
| �����W |
�S���F490mm�A�S���F160mm�A�z�C�[���x�[�X�F168mm |
| �d��(�d�r����) |
585g |
| �d�r |
�}�C�R�����Feneloop lite 4�{�@���[�^���F�A���J��EVOLTA 4�{ |
| �쓮���[�^ |
��֍��E�Ɏw�胂�[�^1���g�p
�^�~���n�C�X�s�[�h�M���{�b�N�X�i�M����11.6:1) |
| �^�C���A�z�C�[�� |
�R�c�v�����^�[����
�O�ցF41mm�@��ցF60mm |
| �T�[�{ |
�T�����FSRM-102Z |
�R�[�X���o
�Z���T |
�f�W�^���Z���T8�i�Z���T���Ver.5�j |
���̑���
�Z���T |
�X�^�[�g�o�[���o�Z���T |
| ���@�� |
�ő�̓����̓}�V�����y���Ƃ������Ƃł��B600g��邱�Ƃ�ڕW�Ɋ�̔z�u��V���[�V�̂���т����H�A�^�C����3D�v�����^�[�Ńz�C�[���𐧍삷��Ȃǂ̌y�ʉ����s���܂����B�}�V�����y���Ȃ������A�����������₷���Ȃ�܂����B |
| ��J�����_ |
�S�����p�Ƀ}�V�����y�ʉ��������ƂŁA�l�����܂ł̐ݒ�ł͑���Ȃ���ԂɂȂ�A������C������̂Ɏ�Ԏ��܂����B�܂��A�o���O���܂ŃZ���T�o�[�̒�����^�C���̒��a��ύX����ȂǁA�����ł��������悤�Ǝ��s������J��Ԃ��܂����B���̒��ň�ԋ�J�������Ƃ́A�ǂ̃R�[�X���C�A�E�g�ɂł������ɑΉ��ł���v���O���������������邱�Ƃł����B |
| ���z |
�S�����o���ڕW�Ɏ��g��ł��܂������A�l�����̌���ŏo���������������Ƃ����M�ɂ��Ȃ�A�v���b�V���[�ɂ��Ȃ�܂����B���̒��ő�20��̋L�O�ƂȂ���A�k�C���ł͍Ō�̑���3�ʂƗǂ����ʂ��c�������͖{���ɂ��ꂵ���ł��B���̌��ʂ́A�ꏏ�Ɏ��g��ł������ԂƂ̋��͂�}�V���ւ̐M���A�܂��A�����g�[�i�����g�ɐi�l���n���3�l���݂��Ɏh�������������炱�����܂ꂽ�Ǝv���܂��B�Ō�ɁA�����Ɋւ��ꂽ�S�Ă̕��ɂ���\���グ�܂��B�{���ɂ��肪�Ƃ��������܂����B |
|
|
 |
 |
 |
| �ォ�猩���Ƃ��� |
�����猩���Ƃ��� |
�߉����猩���Ƃ��� |
|