| �� |
�{�y�[�W�̓��e�́A��ʓ��҂̊F����փA���P�[�g�𑗂�A���������������e���f�ڂ��Ă��܂��B���Z�����������������܂����ږ�̐搶�A�I��̕��X�̂����ӂɊ��Ӑ\���グ�܂��B |
| �� |
�w�Z��{�l�֒��ږ₢���킹�邱�Ƃ͂��Ȃ��悤���肢���܂��B |
|
Basic Class�̕��@�D��
 |
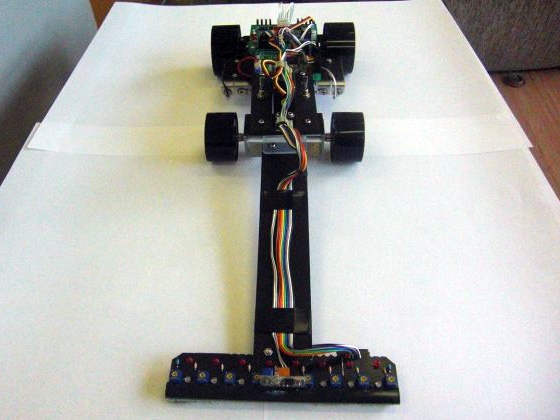
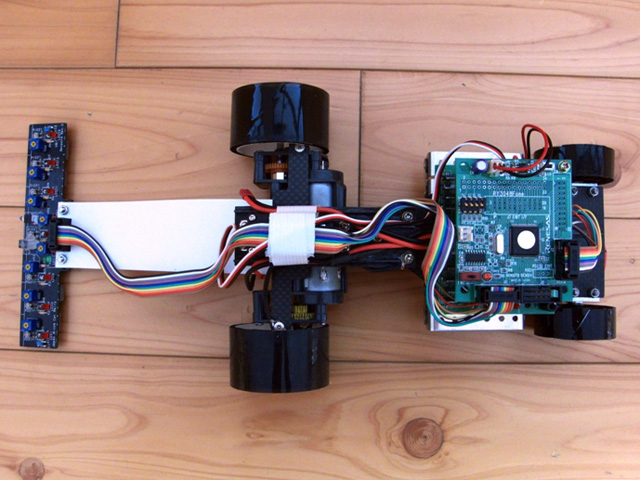
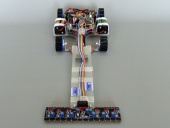
| ���R�����ʖ���썂���w�Z�@���Q�@����@�u�ĕ�(�V���[�u)�v |
| ���@�e |
�ځ@�� |
| �����W |
�S���F450�o�A�S���F�O��140�o�A��ցF155�o
�z�C�[���x�[�X�F160�o |
| �d�� |
530g (�Z���T�A�[�����܂ށE�d�r����) |
| �d�r |
CPU���FEneloop 4�{
���[�^���FEneloop 4�{ |
| �쓮���[�^ |
��֍��E�Ɏw�胂�[�^1���g�p
�^�~���n�C�X�s�[�h�M���{�b�N�X�i�M����11.6:1) |
| �^�C���A�z�C�[�� |
�^�~�����W�R���p�^�C�����g�p
�O�ցF47�o�A��ցF57�o |
| �T�[�{ |
�n�C�e�b�N HS-425BB |
�R�[�X���o
�Z���T |
�f�W�^���Z���T8��(�}�C�R���J�[�̃Z���T���Ver3) |
���̑���
�Z���T |
�X�^�[�g�o�[���o�Z���T |
| ���@�� |
���[�^�h���C�u��ACPU�{�[�h�A�d�r�{�b�N�X�����ɔz�u���A�ԑ̑S�̂̏d�ʃo�����X�����ɔz�u���邱�ƂŁA�T�[�{�ւ̕��S���y�����܂����B
�Z���T���Ver3���g�p���āA�������s�̈��萫�ƃJ�[�u�ւ̓˓����̃n���h�������������߂܂����B�Z���T�A�[���̒����͒��߂ɂ��āA�J�[�u�̌��o�𑁂߃T�[�{�̉������x��������悤�ɍH�v���܂����B |
| ��J�����_ |
�V���[�V�ɃJ�[�{�����g�p�����ۂɁA�`������Ŏd�グ���̂ō��o���̂���ςł����BR450�̘A���E�F�[�u�����炩�ɑ��点�邽�߁A�n���h���̐�p�ƊO�֓��ւ̃p�����[�^�E����ɂƂ��Ȃ��ăZ���T�A�[���̒�����ݒ肷��̂Ɏ��s���낵�Ď��Ԃ�v���܂����B
���[���`�F���W�����炩�ɑ��点�邽�߁A�ԑ̂̏�Ԃɂ��킹�ăn���h���̐�p������̂ɉ��x���g���C���܂����B |
| ���z |
���܂ł���Ă������[���`�F���W��N�����N�ł̃v���O�����̍H�v�A�^�C���̌a�ɂ������g���N�A�⓮�g���N�̌������ʂ��S�����Ƃ�������Ŕ����ł��Ă悩�����ł��B
�@�������x�̓A�h�o���X�̊w�K�Ɏ��g��ł݂����ł��B |
|
 |
 |
 |
 |
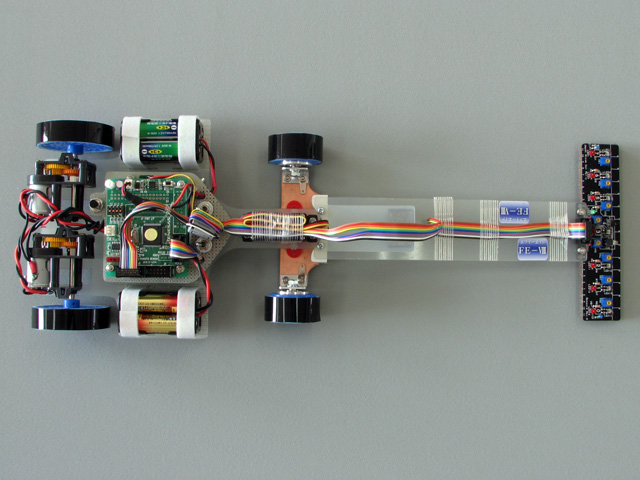
| �ォ�猩���Ƃ��� |
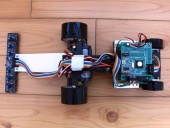
�����猩���Ƃ��� |
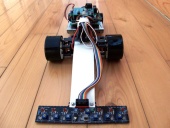
�߉����猩���Ƃ��� |
|
Basic Class�̕��@���D�� |
����H�Ƒ�w�������䍂���w�Z�@�n粁@�K�V��@�u�e�d�|�[�v
|
| ���@�e |
�ځ@�� |
| �����W |
�S���F460mm�A�S���F170mm
�O�փg���b�h���F120mm�A��փg���b�h���F135mm
�z�C�[���x�[�X�F165mm |
| �d�� |
��465g(�d�r����) |
| �d�r |
CPU���F�j�b�P���d�r4�{
���[�^���F�A���J���d�r4�{ |
| �쓮���[�^ |
��֍��E�Ɏw�胂�[�^1���g�p
�^�~���n�C�X�s�[�h�M���{�b�N�X�i�M����11.6:1) |
| �^�C���A�z�C�[�� |
�O��ւƂ�MC�i�C�����ۖ_����Ղʼn��H���A��ւ͑������������|���G�`�����X�|���W���͂߂Ă���B
�O�փ^�C�����a�F41mm�A�O�փ^�C�����F20mm
��փ^�C�����a�F58mm�A��փ^�C�����F15mm |
| �T�[�{ |
�n�C�e�b�N�� HS425BB |
�R�[�X���o
�Z���T |
�f�W�^���Z���T8�i�Z���T���Ver.4�j |
���̑���
�Z���T |
�X�^�[�g�o�[���o�Z���T |
| ���@�� |
��փ^�C�������ׂ����āA�^�C���̓]�����R���ł��邾�����������܂����B�R�[�X�������ł������ǂݎ�邽�߂ɁA�Z���T�A�[�������܂����B |
| ��J�����_ |
�Z���T�[�A�[�����������߂ɁA�ǂ����Ă��N�����N�E���[���`�F���W�ŐU��x���Đ��ŐU��߂��ɂȂ�A����R450�̃X�l�[�N�J�[�u�ł̓M�N�V���N�����������~�߂�̂ɋ�J���܂����B
�܂��A��쓮�̃^�C�������ׂ��Ă��@���ɂ����肵�����肪�o����悤�ɂȂ�܂����B |
| ���z |
���߂Ă̒n����E�S�����œ��܂ł��āA�ƂĂ��������ł��B �\�I�E�����g�[�i�����g�ł́A�d�r���������Ȃ���A���100%�ɋ߂��ݒ�Ŗ]�݂܂�������x���R�[�X�A�E�g���܂���ł����B�D�������͓����܂������A�}�C�R���J�[�̑��ɎQ���ł��ėǂ��v���ł��ł��܂����B |
|
|
 |
 |
 |
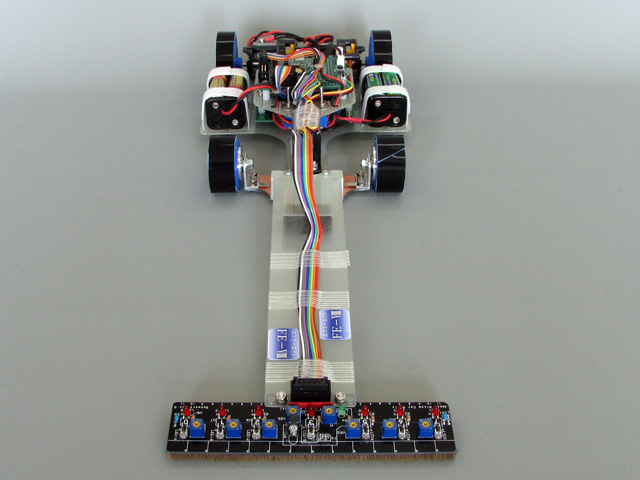
| �ォ�猩���Ƃ��� |
�����猩���Ƃ��� |
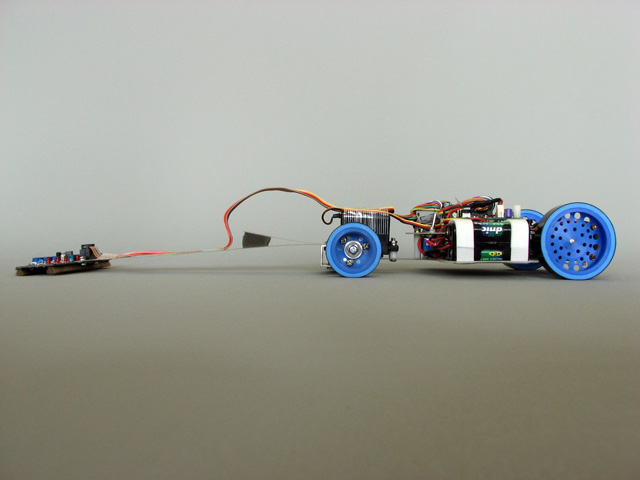
���ʂ��猩���Ƃ��� |
|
Basic Class�̕��@�R��
|
���Q�������R�H�ƍ����w�Z�@���c�@���@�u�`�q�t�v
|
| ���@�e |
�ځ@�� |
| �����W |
�S���F355mm�A�S���F165mm�A�z�C�[���x�[�X�F170mm |
| �d�� |
480g |
| �d�r |
8�{ |
| �쓮���[�^ |
�O�֍��E�Ɏw�胂�[�^1���g�p
�^�~���n�C�X�s�[�h�M���{�b�N�X�i�M����11.6:1) |
| �^�C���A�z�C�[�� |
�s�̃z�C�[���E�X�|���W����Ղʼn��H�����B
���a�F 56mm |
| �T�[�{ |
Futaba S3003 |
�R�[�X���o
�Z���T |
�f�W�^���Z���T8�i�Z���T���Ver.4�j |
���̑���
�Z���T |
�X�^�[�g�o�[���o�Z���T |
| ���@�� |
�O�쓮�ŃJ�[�u�ɋ����Ȃ��Ă���B�{�f�B�ɂ̓J�[�{�����g�p���A�y�ʉ������B�T�[�{�̋Ȃ��p�𑝂₹��悤�ɓd�r�{�b�N�X�̃��C�A�E�g���l�����B |
| ��J�����_ |
�ǂ�������X�s�[�h�����Ƃ����ɃJ�[�u���Ȃ��邱�Ƃ��ł��邩�l���A���̒����ɋ�J�����B�Z���T�[�o�[�̒��������߂邽�߂ɂ��낢��Ȓ������������B |
| ���@�z |
�v���O���~���O��@�B���H�ȂǑS�Ă����߂Ă������̂łƂĂ���J�����B���߂Ă̑S�����ŗǂ����т��c���Ė����ł��B |
|
|
 |
 |
 |
| �ォ�猩���Ƃ��� |
�����猩���Ƃ��� |
���ʂ��猩���Ƃ��� |
|