| ● |
本ページの内容は、上位入賞者の皆さんへアンケートを送り、ご回答いただいた内容を掲載しています。お忙しい中ご回答いただきました顧問の先生、選手の方々のご厚意に感謝申し上げます。 |
| ● |
学校や本人へ直接問い合わせることはしないようお願いします。 |
|
Advanced Class 優勝
 |
| 長野県駒ヶ根工業高等学校 矢澤美貴 「H24」 |
| 内 容 |
詳 細 |
| 長さ関係 |
全長:565mm、全幅:200.6mm、ホイールベース:170mm |
| 重量(電池込み) |
762g |
| 電池 |
eneloop lite 8本 |
| 駆動モータ |
前:1軸1個 後ろ:1軸1個輪
ギヤ比 60:8 |
| タイヤ、ホイール |
タイヤの直径:44mm
KAWADAミニ用ワイドホイールを使用 |
| サーボ |
maxon製 RE-max21
ギヤ比 71.4:1 |
コース検出
センサ |
アナログセンサ5個 |
その他の
センサ |
スタートバーセンサ、坂道検出センサ、エンコーダ |
| 特 徴 |
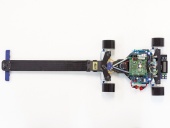
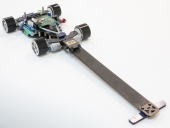
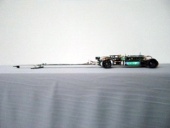
「高剛性化」、「軽量化」、「低重心化」にこだわった。去年からの改善例としては、ステアリングモータをRE-max21に変更。同モータを下向きに取り付け、低重心化を実現。ステアリングのトルク向上に伴いセンサーバーを長くしたため、より早くコース変化を捉え対応することができる。また、坂道検出にアナログセンサを使っており、接触による故障が無いのも特徴。 |
| 苦労した点 |
地区大会で経験した低温下でのタイヤグリップの低下という課題を解決するために多くのスポンジに囲まれ、やっと気温の変化に強いスポンジをみつけたと思ったら、その上に巻くテープで全国大会出発前日まで悩み抜き、タイヤを完成させたこと。 |
| 感想 |
3年間全国大会に出場できたこと、そして最後の年に優勝という結果を出せたことが本当にうれしいです。この結果に至るまでに多くの方のご協力とご助言を得ました。この場を借りて心から感謝を申し上げます。 |
|
 |
 |
 |
 |
| 上から見たところ |
横から見たところ |
斜め横から見たところ |
|
Advanced Class 準優勝
|
| 福岡県立福岡工業高等学校 田中 貴大「隼」 |
| 内 容 |
詳 細 |
| 長さ関係 |
全長:500mm 全幅:177mm ホイールベース:170mm |
| 重量(電池込み) |
590g |
| 電池 |
eneloop lite 8本 |
| 駆動モータ |
前:1軸1個 後ろ:1軸1個輪
ギヤ比:10:54 |
| タイヤ、ホイール |
直径:35mm
MCナイロンを直径24mmに旋盤で加工 |
| サーボ |
maxon製RE-Max17
ギヤ比:62.5:1 |
コース検出
センサ |
デジタルセンサ 5個、アナログセンサ 2個 |
その他の
センサ |
スタートバーセンサー、ジャッジセンサ(クロスライン ハーフライン確認用)、エンコーダ、坂道検出用ポテンショメーター |
| 特 徴 |
「軽量・高剛性・コンパクト・低重心」をコンセプトに今年もマシン開発を行いました。フロント周りの剛性を上げたので走りのバランスが良くなり結果的にタイムが向上しました。 |
| 苦労した点 |
昨年と同様に気温が下がるとタイヤが硬化しタイムが落ちてしまったので、タイヤのスポンジゴムやプログラムのパラメータを変更したがタイムが上がりませんでした。走行中にリセットしたり、マシンをよく壊してしまったので破損箇所を直すことにも苦労しました。 |
| 感想 |
全国大会2連覇を目指して一年間頑張ってきました。しかし今年は準優勝という結果で終わってしまったのでとても残念です。敗因を分析し後輩たちに頑張ってほしいです。ここまでこられたのは先生、先輩方のご指導やマイコンカーラリー事務局などのたくさんの方々のご支援のおかげだと思います。本当にありがとうございました。 |
|
|
 |
 |
 |
| 上から見たところ |
横から見たところ |
斜め横から見たところ |
|
Advanced Class 第3位
|
| 富山県立砺波工業高等学校 山田 亮 「散香」 |
| 内 容 |
詳 細 |
| 長さ関係 |
全長:650mm 全幅:180mm ホイールベース:165mm |
| 重量(電池込み) |
約640g |
| 電池 |
eneloop lite 8本 |
| 駆動モータ |
前モータ:1軸1個、後ろ:1軸1個
ギヤ比 10:60 |
| タイヤ、ホイール |
タイヤの直径:35mm
66ナイロングラファイト入りを外形30mmに旋盤加工 |
| サーボ |
maxon製 RE-Max17
ギヤ比 1:70 |
コース検出
センサ |
ディジタルセンサ5個、アナログセンサ2個、先読み用ディジタルセンサ1個 |
その他の
センサ |
ロータリーエンコーダ1個、ポテンショメータ1個、ゲート用センサ1個 |
| 特 徴 |
加工のし易さと軽量化を図るため、モータマウントは5mm厚でシャーシは1.5mm厚のカーボン板をCNCフライスで製作し、ほとんどがカーボン製です。 |
| 苦労した点 |
ゲートセンサはスタート時しか使わず、もったいないので坂道検出用にも使えることが分かり、センサの数を減らしました。強度を落とさずに軽量化することに一番、苦労しました。 |
| 感想 |
予選通過が目標で、決勝ではなるべく良い結果を残そうという気持ちだったので、3位という結果に驚き大変嬉しかったです。決勝を勝ち進めたのは運も有りますが、安定に完走してくれたからだと思います。来年も全国大会出場を目指し、頑張りたいと思います。 |
|
|
 |
 |
 |
| 上から見たところ |
横から見たところ |
斜め横から見たところ |
|









