| ● |
本ページの内容は、上位入賞者の皆さんへアンケートを送り、ご回答いただいた内容を掲載しています。お忙しい中ご回答いただきました顧問の先生、選手の方々のご厚意に感謝申し上げます。 |
| ● |
学校や本人へ直接問い合わせることはしないようお願いします。 |
|
Advanced Class 優勝
 |
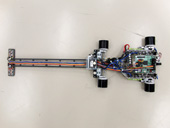
| 長野県駒ヶ根工業高等学校 白鳥 昇 「朱雀」 |
| 内 容 |
詳 細 |
| 長さ関係 |
全長:540mm、全幅:195mm、ホイールベース:165mm |
| 重量(電池込み) |
721g |
| 電池 |
eneloop lite 8本、または TAMIYA NEO CHAMP 8本 |
| 駆動モータ |
前:1軸1個 後ろ:1軸1個輪
ギヤ比 60:8 |
| タイヤ、ホイール |
タイヤの直径:44mm
KAWADA「ミニ用ワイドホイール」にスポンジとして三和化工「オプセルLC-150」(厚さ3mm)を接着、表面にOPPテープを巻く |
| サーボ |
maxon製 RE-max21
ギヤ比 71.4:1 |
コース検出
センサ |
アナログセンサ5個 (SHARP GP2S700×3、 KODENSHI SG-105F×2) |
その他の
センサ |
スタートバーセンサ、坂道検出センサ、エンコーダ |
| 特 徴 |
「高剛性、低重心、軽量」にこだわった。コース検出センサと坂道検出センサすべてにアナログセンサを使用している。エンコーダを後輪の軸上につけて坂道でのエンコーダの接地の変化を防いでいる。センサバーの先端をカーボン板で保護することでセンサ基板を守り、壊れにくくしている。 |
| 苦労した点 |
昨年の大会では完走率が低かったので、完走率を上げるために様々なパターンで走行テストを繰り返し、その場その場でマシンに最大限の走りをさせるための調整力を身につけるのが大変だった。大会が近くなってマシンの走りが悪くなり、カーブでふくらむのを改善するのに苦労した。 |
| 感想 |
3年間この活動に取り組めたこと、活動を通してたくさんのことを学べたこと、更にはたくさんの方々の思いを感じそれを次の世代に届けることができたことが本当に嬉しいです。今回の私の優勝が多くの皆さんにとって今後の活動の原動力になってくれたら幸せです。最後に、活動を支えてくださった方々、競い合ってくださった方々、マイコンカーラリー大会を運営してくださった方々全員にこの場をお借りして心から感謝を申し上げます。 |
|
 |
 |
 |
 |
| 上から見たところ |
横から見たところ |
斜め横から見たところ |
|
Advanced Class 準優勝
|
| 福岡県立福岡工業高等学校 大神 隆之介 「wisdom」 |
| 内 容 |
詳 細 |
| 長さ関係 |
全長:530mm 全幅:170mm ホイールベース:172mm |
| 重量(電池込み) |
580g |
| 電池 |
eneloop lite 8本 |
| 駆動モータ |
前:1軸1個 後ろ:1軸1個輪
ギヤ比:10:54 |
| タイヤ、ホイール |
直径:36mm
MCナイロンを直径24mmに旋盤で加工、厚さ3mmの2種類のスポンジの2層構造 |
| サーボ |
maxon製RE-Max17
ギヤ比:62.5:1 |
コース検出
センサ |
デジタルセンサ 5個、アナログセンサ 2個 |
その他の
センサ |
スタートバーセンサ、ジャッジセンサ2個(クロスライン、ハーフライン確認用)、エンコーダ、坂道上り下り検出用ポテンショメーター |
| 特 徴 |
「軽量・高剛性・コンパクト・低重心」をコンセプトにマシン開発を行いました。低重心化とフロント、リア周りの剛性をあげたので走りのバランスが良くなり結果的にタイムが向上しました。 |
| 苦労した点 |
地区大会後、新しいタイヤの製作を行いました。マシンに適したスポンジ・ホイールの組合せを見つけるために部員でテスト走行を行ない、試行錯誤の末、大会直前に最高の組合せのタイヤを見つけることが出来ました。また、タイヤの接地を改善することにも苦労しました。 |
| 感想 |
「TEAM FUKKO」の精神で、福岡県大会、九州地区大会を戦ってきました。全国大会に向けて、どのようなレイアウトでもスムーズに走るパラメータの設定を部員のみんなで探求しました。準優勝という結果を残せたのは、先生方や部員、大会の運営に関わってくださった皆様のおかげです。本当にありがとうございました。来年度は全国優勝を目標にして、より一層活動に励みたいと思います。 |
|
|
 |
 |
 |
| 上から見たところ |
横から見たところ |
斜め横から見たところ |
|
Advanced Class 第4位
|
| 富山県立富山工業高等学校 岡田 翼 「人参」 |
| 内 容 |
詳 細 |
| 長さ関係 |
全長:560mm 全幅:195mm ホイールベース:前輪165mm、後輪195mm |
| 重量(電池込み) |
約780g |
| 電池 |
NiCa 8本 |
| 駆動モータ |
前モータ:1軸1個、後ろ:1軸1個
ギヤ比 10:54 |
| タイヤ、ホイール |
タイヤの直径:34mm
ジュラコン丸棒より削り出し |
| サーボ |
maxon製 RE-max250021
ギヤ比 4:243 |
コース検出
センサ |
ディジタルセンサ5個、アナログセンサ2個 |
その他の
センサ |
角度検出用ポジションセンサ2個 |
| 特 徴 |
低重心で、機体も制御部もコンパクトになるように製作しました。最初は機体の軽さを追求していましたが、走り込むにつれ、重量バランスが大事だと思うようになり、ウエイトをのせたりし、最終的には地区大会の時よりも重たくなってしまいました。 |
| 苦労した点 |
タイヤの素材を柔らかくしたため、ブレーキなどでグリップさせた際に、張ったシリコンシートの黒いシリコンの部分だけが剥離してしまうという症状に悩まされました。 |
| 感想 |
予選の1回目は想定外のコースアウトだったので、非常に焦りました。決勝の逆走のコースでは、下り坂後の急カーブでコースアウトしてしまいました。これにはプログラムが対応していなかったので、やはり全国大会のコースは難しいなと思いました。 |
|
|
 |
 |
 |
| 上から見たところ |
横から見たところ |
斜め横から見たところ |
|









